Viestissä selitetään DC-moottorin ohjain, jossa on vakio momentin kompensointi, jotta moottori voi käydä tasaisella nopeudella moottorin kuormituksesta riippumatta.
Tavallisten nopeudenohjainten haittapuoli
Yksi haittapuoli suurimmasta osasta yksinkertaiset nopeudensäätimet tarjoavatko ne vain moottorille ennalta määrätyn vakiojännitteen. Tämän seurauksena nopeus ei pysy vakiona ja vaihtelee moottorin kuormituksen mukaan vääntömomentin kompensoinnin puuttuessa.
Esimerkiksi mallijunassa, yksinkertaisilla ohjaimilla, junan nopeus pienenee asteittain kiipeilygradienteilla ja kiihtyy alamäkeä kohti.
Siksi mallijunissa potinohjauksen säätö valitun moottorin nopeuden ylläpitämiseksi poikkeaa myös riippuen kuormasta, jota moottori saattaa vetää.
Tässä artikkelissa selitetty vakiomomentin moottorin kierrosluvun säätöpiiri poistaa tämän ongelman seuraamalla moottorin nopeutta ja pitämällä sen vakiona ennalta määrätylle säätöasetukselle riippumatta siitä, mikä kuorma moottorilla voi olla.
Piiriä voidaan käyttää useimmissa malleissa, joissa käytetään tasavirtaista kestomagneettimoottoria.
EMF-takaisinkertoimen laskeminen
Moottorin napojen yli kulkeva jännite käsittää pari tekijää, takaosan e.m.f. moottorin tuottama, ja jännite putosi armatuurivastuksen yli.
Takana e.m.f. moottorin käämityksen tuottama on yleensä verrannollinen moottorin nopeuteen, mikä tarkoittaa, että moottorin nopeutta voitaisiin valvoa mittaamalla tämä takaisin emf-pitoisuus. Mutta tärkein asia on eristää ja havaita takana oleva e.m.f. ankkurivastuksen jännitteestä.
Olettaen, että erillinen vastus on kiinnitetty sarjaan moottorin kanssa, silloin kun otetaan huomioon, että tämän vastuksen ja myös ankkuri-vastuksen läpi kulkee yhteinen yksittäinen virta, kahden sarjassa olevan vastuksen jännitteen pudotus voisi hyvinkin olla sama kuin putken vastuksen vastus.
Itse asiassa voidaan olettaa, että kun nämä kaksi vastusarvoa ovat identtiset, molempien vastusten kaksi jännitteen suuruutta ovat myös samanlaiset. Näiden tietojen avulla voi olla mahdollista vähentää R3: n jännitehäviö moottorin jännitteestä ja saada vaadittu e.m.f-arvo prosessointia varten.

Palautuvan EMF: n käsittely vakiomomentille
Ehdotettu piiri valvoo jatkuvasti takaosaa. ja säätelee vastaavasti moottorin virtaa sen varmistamiseksi, että annetulle potin ohjausasetukselle taka e.m.f. ja moottorin nopeus pidetään vakiona.
Piirin kuvauksen helpottamiseksi katsotaan, että P2 säädetään ja pidetään keskiasennossaan, ja vastus R3 valitaan vastaavaksi moottorin ankkurin vastusarvolle.
Lasketaan moottorin jännite
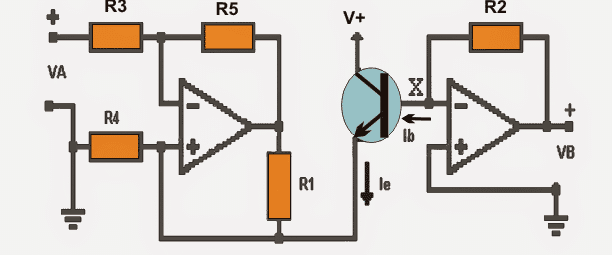
Moottorin jännite voidaan laskea lisäämällä taka e.m.f. Va jännitteen ollessa pudonnut moottorin sisäisen vastuksen Vr yli.
Ottaen huomioon, että R3 putoaa jännitteen Vr, lähtöjännite Vo on yhtä suuri kuin Va + 2 V.
Jännite IC1: n käänteistulossa (-) on Va + Vr, ja ei-invertoivassa tulossa (+) Vi + (Va + 2Vr - Vi) / 2
Koska yllä olevien kahden jännitteen suuruuden oletetaan olevan samat, järjestämme yllä olevan yhtälön seuraavasti:
Va + Vr = Vi + (Va + 2Vr - Vi) / 2
Tämän yhtälön yksinkertaistaminen antaa Va = Vi.
Yllä oleva yhtälö osoittaa, että takaosan e.m.f. moottoria pidetään jatkuvasti samalla tasolla kuin ohjausjännite. Tämän ansiosta moottori voi toimia vakionopeudella ja vääntömomentilla missä tahansa P1-nopeuden säätöasetuksessa.
P2 sisältyy kompensoimaan R3-vastuksen ja ankkuri-vastuksen välinen erotaso. Se toteuttaa tämän säätämällä positiivisen takaisinkytkennän voimakkuutta ei-invertoivalle tulo-op-vahvistimelle.
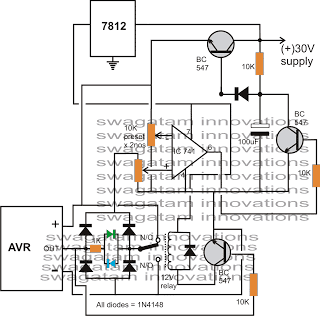
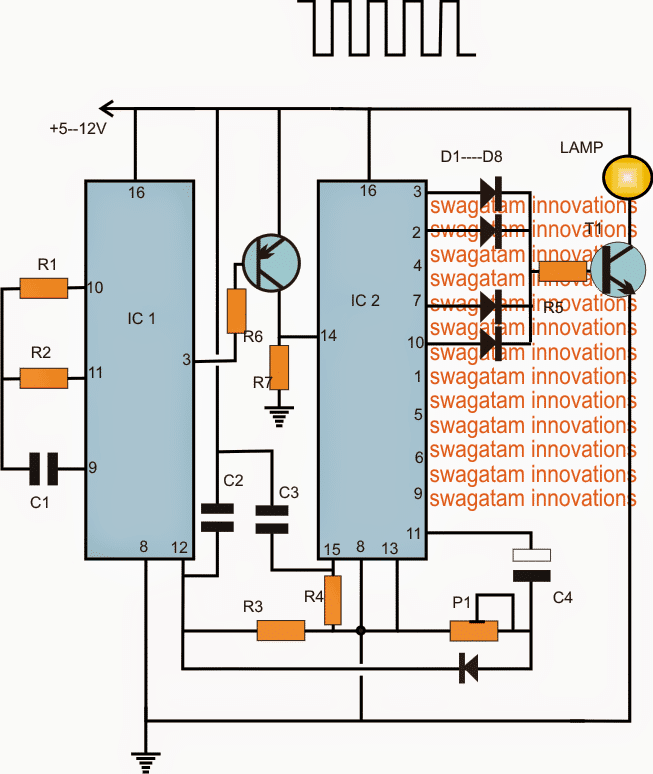
Op-vahvistin LM3140 vertaa periaatteessa moottorin ankkurin yli kehitettyä jännitettä takaosan emf-ekvivalenttiin moottorin yli ja säätelee T1 2N3055: n peruspotentiaalia.
T1 konfiguroidaan lähettäjän seuraaja säätää moottorin nopeutta peruspotentiaalinsa mukaisesti. Se lisää jännitettä moottorin yli, kun op-vahvistin havaitsee korkeamman taka-emf: n, mikä johtaa moottorin nopeuden kasvuun ja päinvastoin.
T1 tulisi asentaa sopivan jäähdytyselementin päälle moitteettoman toiminnan takaamiseksi.
Kuinka asettaa piiri
Vakion vääntömomentin moottorin kierrosluvun säätöpiiri asetetaan säätämällä P2 moottorilla vaihtelevalla kuormituksella, kunnes moottori saavuttaa vakion vääntömomentin kuormitusolosuhteista riippumatta.
Kun piiriä sovelletaan mallijuniin, on varottava, ettei P2 käännetä liikaa kohti P1: tä, mikä saattaa johtaa mallijunan hidastumiseen, ja päinvastoin P2: ta ei saa kääntää liikaa vastakkaiseen suuntaan, mikä voi johtaa junan nopeus tosiasiallisesti kasvaa nousun ylämäkeen noustessa.
Edellinen: Yksinkertaiset Ni-Cd-akkulaturipiirit tutkittu Seuraava: Mini-lähetin-vastaanotinpiiri