Erityisesti robottiteknologian kehittyessä robotit ovat hallitsevia monissa sovelluksissa. Jotkut näistä ovat erittäin riskialttiita ja vaarallisia alueita. Sotilas- ja taistelukentäsovellukset lisäävät nyt robottien käyttöä joissakin tärkeissä ja monimutkaisissa tehtävissä. Yhdessä artikkelissani olen kuvannut robottien käyttöä vakoojana sotilasoperaatioissa. Entä jos on tarpeen puolustaa robotti-ajoneuvo vai robotin hyökkäys? Sieltä tulee tarve hyökkäysmekanismiin upotetulle robotille. Yksi tällainen esimerkki on robotti ajoneuvo, jossa on LASER-ase.

RF-ohjattu robottiauto, lasersädejärjestely
Tällaista robottia käytetään pohjimmiltaan sotilasoperaatioissa ja myös liikennepoliisit havaitsemaan liikkuvien ajoneuvojen nopeuden.
Ennen kuin ryhdymme yksityiskohtiin robotteista, joissa on laser-aseet, anna meidän ymmärtää nopeasti LASER aseena.
LASER-valonsäde (Light Amplification by Stimulation Emission) on yksisuuntainen voimakkaasti kohdennettu valo, toisin kuin yksinkertaisen lampun valo. Se koostuu synkronoiduista kouruista ja harjoista, ts. Aallot eivät häiritse toisiaan. Tämä tuottaa voimakkaasti kohdennetun valon, jolla on erittäin suuri teho, luokkaa 1000 - 1 miljoonaa kertaa suurempi kuin tyypillinen hehkulamppu. Se on laite, joka ohjaa fotonien emissiota ja absorptiota pumppaamalla riittävästi energiaa. Tässä fotonien lähde vahvistetaan valonsäteeksi. Näiden lasereiden aallonpituus vaihtelee eri spektreiksi, kuten näkyviksi, infrapuna- ja ultraviolettisäteiksi.
LASERin periaate pyörii kolmen asian ympärillä: absorbointi, spontaani emissio ja stimuloitu emissio. Riittävä määrä fotonista tulevaa energiaa on vuorovaikutuksessa atomin kanssa, mikä saa atomin siirtymään pienemmästä energiatilasta korkeampaan energiatilaan. Tämä atomi on pudonnut takaisin alemman energian tilaan lähettämällä fotonia, jota kutsutaan spontaaniksi emissioksi. Stimuloidussa emissiossa tarkoitetaan energian vapautumista atomista keinotekoisin keinoin. joten fotoni on vuorovaikutuksessa viritetyn atomin kanssa, sillä on sama energia ja polarisaatio kuin tulevalla fotonilla.
Katsokaamme nyt robotin laitteiston osia
- Pohja: Tällaisen robotin pohja voi olla mikä tahansa kuutiomainen runko, johon on kiinnitetty pyörät sen liikkumista varten.
- DC-moottori: Robotti koostuu kahdesta tasavirtamoottorista, joita moottorin kuljettajat käyttävät, ja se tarjoaa vaaditun liikkeen robotille.
- Ohjausyksikkö: Robotin liikettä ohjataan RF-tietoliikennemoduulilla. Lähetin koostuu painikkeista, mikrokontrollereista, dekooderista ja RF-lähettimestä, kun taas robottiin upotettu vastaanotinyksikkö koostuu kooderista ja RF-vastaanotinmoduulista robotti liike .
- LASER-ase: Robotille on asennettu LASER-ase, joka suorittaa robotin päätehtävän.
Livahtaa robotin toimintaan
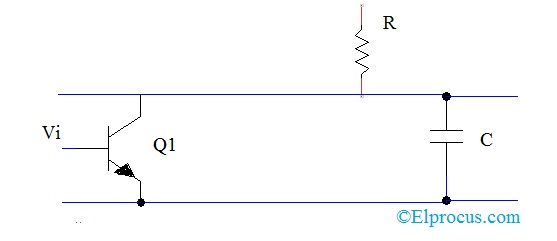
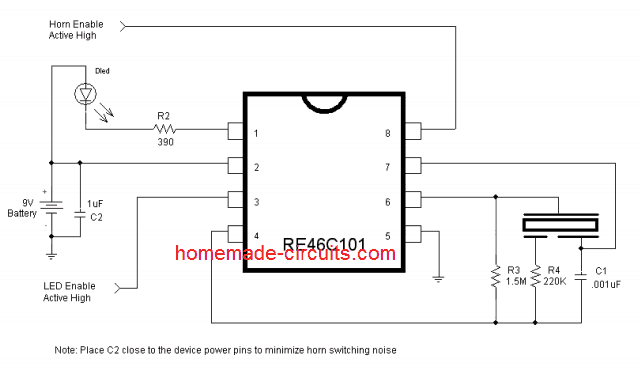
Vaadittuun suuntaan liikkuva robotti ampuu LASER-aseesta voimakkaan valonsäteen, joka voi joko vahingoittaa kohdetta tai tuottaa vain paikan kohteen havaitsemiseksi. Joidenkin energialähteiden on käytettävä LASERia. Yksinkertaisessa prototyyppisuunnittelussa, jossa käytetään perus-LASER-kynää, laitetta ohjaa transistori, joka toimii kytkimenä. Transistori vastaanottaa matalan logiikkasignaalin mikrokontrollerilta ja on pois päältä, jolloin LASER-moduuli kytketään suoraan 5 V: n virtalähteeseen.

Transistorin käyttämä laser-ase, joka toimii invertterinä
Robotin hallinta
Robotin liikkeen hallitsemiseksi moottoreiden toimintaa on ohjattava. Tämä voidaan tehdä käyttämällä moottorin kuljettajien RF-ohjattua toimintaa. Komennot lähetetään radiotaajuuslähettimen avulla noin 200 metrin etäisyydellä ja RF-vastaanotin vastaanottaa ne moottoreiden käyttämiseksi.
Lähetinyksikkö koostuu useista painikkeista, jotka toimivat komentokytkiminä robotin siirtämiseksi haluamaasi suuntaan. Painikkeet on liitetty mikrokontrolleriin, joka on ohjelmoitu lähettämään tietoja rinnakkaisessa muodossa painonapitulon perusteella kooderille. Kooderi muuntaa tämän rinnakkaisdatan sarjamuodoksi ja tämä sarjadata lähetetään RF-lähetinmoduulin avulla antennin kautta.

Lohkokaavio, jossa näkyy lähetinosa
Vastaanotinyksikkö koostuu RF-vastaanotinmoduulista, joka vastaanottaa moduloidun signaalin ja demoduloi sen. Dekooderi vastaanottaa demoduloidun signaalin sarjamuodossa ja muuntaa sen rinnakkaismuotoon. Mikrokontrolleri vastaanottaa signaalit ja ohjaa moottorin ohjainta vastaavasti. LM293D: ssä käytetty moottoriohjain, joka voi ohjata kahta moottoria kerrallaan.

Lohkokaavio, joka näyttää vastaanottimen osan
Täten RF-viestinnän avulla voimme hallita robottia.
Edellä olevissa kuvauksissa olen antanut lyhyen idean robottiajoneuvon yksinkertaisesta prototyypistä, jossa on LASER-palkki. Todellisissa sovelluksissa robotin ohjaamiseen kaukaisista paikoista käytetään yleensä pitkän kantaman viestintäjärjestelmiä, kuten GSM tai DTMF.
3 Laser-aseella varustetun robottiajoneuvon sovellukset:
- Kohteen tunnistus : Robottiajoneuvo voi käyttää LASER-sädettä aiheuttaakseen paikan kohdalle siten, että se on helposti nähtävissä ja kohdistettavissa. Esimerkki on Air Borne LASER.
- Kohteen tuhoaminen : Vahva Laser-säde suuruusluokaltaan 95 GHz voi aiheuttaa polttavaa tunnetta ihmiskehossa, kun se tunkeutuu ihoon 1/64thtuuman ja säteen energia voi lämmittää vesimolekyylit kehossa. Yksi esimerkki on USA: n kehittämä aktiivinen kieltojärjestelmä.
- Kohdeetäisyysmittari ja nopeuden tunnistus : Robottiajoneuvon LASER-sädettä voidaan käyttää kohteen etäisyyden löytämiseen LASER-valonheijastuksen periaatteella, ja myös kohteen nopeus voidaan laskea, kun voimme saada etäisyyden.
Joten nyt meillä on lyhyt käsitys siitä, että robotit käyttivät kohdetunnistinta ja hävittäjää. Onko sillä mitään hyötyä normaalille yleisölle kuin vain armeijalle? Ajattele ja vastaa.