Tässä viestissä tutkimme IC L293: n, joka on monipuolinen nelirenkainen puoli-H-ohjain-IC, teknisiä tietoja ja liitäntäkohtia, ja jota voidaan käyttää monien mielenkiintoisten moottoreiden toteuttamiseen kuljettajapohjainen piiri sovelluksia, kuten moottoreiden, solenoidien ja muiden induktiivisten kuormien käyttämiseen (4 yksikköä erikseen tai pareittain push-pull-tilassa).
Kuinka se toimii
IC L293 sisältää pohjimmiltaan kaksi lähtöparia, joita voidaan käyttää itsenäisesti kahden erillisen kuorman käyttämiseen työntömoodissa tai kaksisuuntaisesti, joita kutsutaan myös toteemipylväsmoodiksi. Vaihtoehtoisesti nämä pari lähtöparia voidaan erikseen käyttää käytetään 4 yksittäisen kuorman käyttämiseen yksisuuntaisesti.
Edellä mainittuja kuormien toimintoja ohjataan vastaavien tuloliittimien kautta, jotka laukaistaan ulkoisesta oskillaattoripiiristä tai a PWM-lähde .
Esimerkiksi jos kuormaa vaaditaan käyttämään totemipylväässä, IC: n kahden kuljettajan vaiheen vastaavat tulot voidaan laukaista ulkoisesta oskillaattori, esimerkiksi parin NAND-portin läpi , jossa yksi portti voitaisiin kytkeä oskillaattorina ja toinen invertterinä.
Nämä kaksi antifaasisignaalia NAND-portit voidaan sitten liittää L293: n tuloihin asiaankuuluvien lähtöjen käyttämiseksi totemipylväässä (push-pull), mikä vuorostaan käyttäisi kytkettyä kuormaa samalla tavalla.
IC: n L293: n pinouts-tehtävä
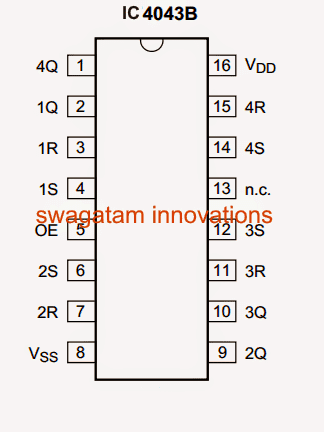
Opitaan nyt IC L293: n pinout-toiminnot viittaamalla seuraavaan kaavioon ja seuraavasta selityksestä:

Tappi # 2 on ohjaustulo, joka ohjaa lähtötappia # 3.
Vastaavasti nasta # 7 on lähtötapin # 6 ohjaustulo.
Tappia # 1 käytetään joko yllä olevien pinouts-sarjojen ottamiseen käyttöön tai poistamiseen käytöstä. Nasta # 1: n positiivinen pitää yllä olevat pinouts-sarjat käytössä ja aktiivisia, kun taas negatiivinen tai 0 V: n syöttö poistaa ne välittömästi.
Aivan identtisesti, nastoista # 15 ja nastoista # 10 tulee vastaavien nastojen nro 14 ja nastojen # 11 ulostulojen ohjaustulot, ja ne pysyvät toiminnassa vain niin kauan kuin nasta # 9 pidetään positiivisella logiikalla ja poistetaan käytöstä, kun 0 V: n logiikka on sovellettu tähän pinoutiin.
Kuten aiemmin selitettiin, nastoja # 3 ja nastoja # 6 voidaan käyttää toteemipylväspareina syöttämällä antifaasilogiikkasignaalia tulotappeihinsa # 7 ja nastoihin # 2. Merkitys, kun nastalle # 2 syötetään positiivista logiikkaa, nastan # 7 on oltava negatiivisessa logiikassa ja päinvastoin.
Tämä sallii lähtötappien # 6 ja nastojen 3 käyttää liitettyä kuormaa vastaavassa suunnassa, ja päinvastoin, kun tulologiikkasignaalit ovat päinvastaiset, myös kuormituksen napaisuus muuttuu ja se alkaa pyöriä vastakkaiseen suuntaan.
Jos tätä järjestystä vaihdetaan nopeasti, kuorma toimii vastaavasti edestakaisin tai työntötavalla.
Yllä oleva toimenpide voidaan toistaa myös toisen ohjainparin yli.
IC: n Vcc tai syöttöpositiiviset tulot konfiguroidaan itsenäisesti kahdelle eri syöttötulolle.
Nastaa # 16, (Vcc1) käytetään aktivointitapojen käyttämiseen ja IC: n muiden sisäisten logiikkavaiheiden käyttämiseen, ja tämä voidaan toimittaa 5 V: n tulolla, vaikka maksimirajoitus on 36 V
Tappia # 8, (Vcc2) käytetään erityisesti moottoreiden virtalähteeseen, ja sitä voidaan syöttää kaikilla 4,5 V - 36 V
IC: n sähköiset määritykset L293
IC L293 on suunniteltu toimimaan millä tahansa 4,5 V: n ja 36 V: n välisellä virtalähteellä, ja suurin virran käsittelymääritys on enintään 1 ampeeri (2 ampeeria pulssitilassa, enintään 5 ms)
Siksi mitä tahansa yllä mainittujen spesifikaatioiden mukaista kuormaa voidaan käyttää IC L293: n keskustelluissa ulostuloissa.
Tulonohjauslogiikkaa ei saa ylittää yli 7 V, joko jatkuvana tai PWM-syötteenä.
L293 IC: n käyttäminen moottorinohjaussovelluksessa
Opitaan nyt, miten moottoriohjauspiirit toteutetaan IC L293: n avulla eri toimintatilojen kautta ja käyttämällä jopa 4 moottoria erillisellä ohjauslaitteella.
Edellisessä kirjoituksessamme tutkimme IC L293: n kytkentä- ja toimintatietoja, täällä opimme, kuinka samaa IC: tä voidaan käyttää moottoreiden ohjaamiseen tietyillä tiloilla ja kokoonpanoilla.
Ohjaustilat
IC L293: ta voidaan käyttää moottoreiden ohjaamiseen seuraavissa tiloissa:
1) 4 moottoria itsenäisten PWM-tulojen kautta.
2) 2 moottoria kaksisuuntaisessa tai toteemipylväsmoodissa nopeuden ohjauksella PWM: n kautta
3) Yksi 2-vaiheinen BLDC-moottori PWM-tuloa käyttäen
Alla oleva kuva osoittaa, kuinka mikropiiriä voitaisiin käyttää moottoreiden ohjaamiseen itsenäisillä ohjaimilla ja myös kuinka yhtä moottoria voitaisiin käyttää kaksisuuntainen ohjaus :

IC: n vasemmalla puolella näkyy moottori, joka on konfiguroitu toimimaan kaksisuuntaisessa tilassa. Sen varmistamiseksi, että moottori pyörii jossakin valituista suunnista, nastat # 1 ja nastat # 7 on käytettävä antifaasisella 5 V DC-tulolla. Moottorin pyörimissuunnan muuttamiseksi tätä 5 V: n napaisuutta voidaan muuttaa mainittujen tuloliittimien kautta.
Tappi # 1 on pidettävä logiikkakorkealla, jotta moottori ja mikropiiri toimisivat, logiikka 0 pysäyttää moottorin välittömästi.
Syöttö ohjaustulon pinouteissa voisi olla PWM: n muodossa, sitä voitaisiin käyttää lisäksi moottorin nopeuden säätäminen 0: sta maksimiin yksinkertaisesti muuttamalla PWM-työjaksoa.
IC: n oikea puoli kuvaa järjestelyä, jossa pari moottoria ohjataan itsenäisesti riippumattomien PWM-tulojen kautta vastaavalla tapilla # 15 ja tapilla # 10.
Tappi # 9 on pidettävä logiikkakorkealla, jotta moottori ja IC toimivat. Looginen nolla tässä pinoutissa pysäyttää välittömästi ja poistaa käytöstä liitettyjen moottoreiden toiminnan.
Koska mikropiirin vasen ja oikea puoli ovat identtiset pinout-toimintojensa kanssa, esitetty moottorien järjestely voitaisiin vaihtaa asiaankuuluvien pinoutien yli identtisen toiminnan saavuttamiseksi, kuten edellä on selitetty, mikä tarkoittaa, että kaksi yksittäistä moottoria voidaan liittää IC: n vasemmalla puolella täsmälleen samalla tavalla kuin IC: n oikealla puolella.
Samoin kaksisuuntainen järjestelmä voitaisiin sisällyttää IC-pinoutien oikealle puolelle täsmälleen samalla tavalla kuin IC: n vasemmalla puolella saavutetaan yllä esitetyssä kaaviossa.
Yllä oleva esimerkki osoittaa, kuinka IC L293: ta voidaan käyttää ohjaamaan 4 moottoria erikseen tai 2 moottoria kaksisuuntaisessa tilassa, ja kuinka nopeutta voidaan hallita myös PWM-syötteellä IC: n asiaankuuluvissa tuloliittimissä.
2-vaiheisen BLDC-moottorin ohjaaminen L293: n avulla

Yllä olevasta kuvasta voimme nähdä, kuinka IC L293 voidaan konfiguroida ohjaamaan 2-vaiheista BLDC-moottoria ilmoitettujen pinoutien avulla ja muutaman ohjaustulon kautta, jotka näytetään ohjaimena A ja ohjaus B.
Yksi 2-vaiheinen moottori voidaan nähdä kytkettynä mikropiirin ulostulojen yli, kun taas tulot on kytketty joukolla EI-portteja, jotka ovat vastuussa tarvittavan vaiheenvastaisen tulologiikan luomisesta moottorin ohjausta varten.
Ohjaus A- ja B-pisteille voidaan asettaa vuorottelulogiikka, jotta kaksivaiheinen moottori pyörii oikein.
Vaihtelevan logiikan napaisuus päättää moottorin pyörimissuunnan.
Lineaarisen nopeuden ohjauksen saavuttamiseksi moottorilla PWM-logiikan muoto voitaisiin toteuttaa ohjauksen A ja ohjaus B tulojen yli ja sen käyttöjaksoa voitaisiin vaihdella halutun nopeuden ohjauksen saavuttamiseksi kytketyllä moottorilla.
Jos sinulla on vielä epäilyksiä teknisistä eritelmistä, lomakkeesta tai IC: n pinout-tiedoista, voit aina kommentoida alla olevia vastauksia.
Pari: Langaton lämpömittari käyttäen 433 MHz: n RF-linkkiä Arduinolla Seuraava: Yleinen ESC-piiri BLDC- ja generaattorimoottoreille