Posti sisältää perusteellisen kuvauksen Flynn-moottoripiirikonseptista ja antaa karkeat replikointitiedot samalle.
Rinnakkaispolku -konsepti
Yhdessä edellisistä viesteistä saimme kattavan kuvan siitä, mikä väestö tunnetaan nimellä rinnakkaisen polun magneettinen teoria
Tässä teoriassa suhteellisen heikompaa sähkömagneettista apua käytetään muutamista suljetuista kestomagneeteista saadun massiivisen voiman manipulointiin.
Sama teoria, kun se toteutetaan pyörimisliikkeen saamiseksi, pystyy luomaan voimaksi, jota ei voida saavuttaa tavanomaisilla moottorikonsepteilla.
Alla olevassa kuvassa, jota kutsutaan myös Flynn-moottoriksi, on perus- tai klassinen esitys, joka osoittaa, kuinka rinnakkaispolutekniikka voitaisiin toteuttaa rakennettaessa moottoreita erinomaisella hyötysuhteella.
Flynn-moottorin ymmärtäminen
Flynn-moottorissa käytetty käsite ei ole rakettitiede, vaan hyvin yksinkertainen magneettinen teoria, jossa kestomagneettien magneettinen vetovoima toteutetaan valtavan määrän vapaan energian tuottamiseksi.
Alla olevat kuvat esittävät Fynns-moottorin perusrakennetta, jolla on tavallisen moottorin tavoin uloin staattori ja sisäinen roottori.
Staattori on paperitavararakenne, joka koostuu kahdesta ferromagneettisesta osasta, jotka on erityisesti mitoitettu helpottamaan ehdotettuja yhdensuuntaisia reittejä.
Staattorin / roottorin suunnittelu
Pohjimmiltaan nämä ovat kaksi C-muotoista ferromagneettista rakennetta, joilla on keskilohkotila kelakäämityksen sijoittamiseksi, kun taas päät on taltattu tasaisiksi parin pysyvän magneetin kytkemiseksi kahden C-rakenteen väliin.
Yllä olevat rakenteet muodostavat staattorin.
Pyöreä rakenne, joka koostuu myös ferromagneettisesta materiaalista, näkyy tarkalleen kahden C-muotoisen staattorin keskellä. Tämä muodostaa ehdotetun Flynn-moottorirakenteen roottorin.
Yllä oleva roottorin pyöreä rakenne ympäröi viisi projisoitua kuperaa vartta sen ympärysmitalla erityisellä leikkausmuodolla, joka muodostaa lasketun kulman komplementaaristen koverien reunojen kanssa, jotka on suljettu kahden C-muotoisen staattorin kanssa.
Roottori / staattorin pintojen välinen suhteellinen kulma on konfiguroitu siten, että kaikki pinnat eivät koskaan tule kasvotusten missään hetkessä.
Ymmärretään nyt, kuinka lankakäämi ja kestomagneetit vuorovaikutuksessa tuottavat ehdotetun ylimääräisen voiman roottorin liikkeelle.
Moottorin käämityksen yksityiskohdat
Niin kauan kuin staattorin yli käämitystä ei ole kytketty määritettyyn sähköliitäntään, kaikilla neljällä staattorin koveralla sisäpinnalla on yhtä suuri magneettinen vetovoima roottorin varsien päällä, jolloin roottorin liike ei vaikuta.
Edellä mainittu magneettinen vetovoima johtuu kahdesta pysyvästä magneetista, jotka ovat sijoitettu esitettyihin paikkoihin.
Heti kun sähköinen syöttö syötetään käämityksen yli (jonka on vaihdeltava kahden kelan yli millä tahansa määritetyllä taajuudella), roottori kokee rinnakkaisen polun vaikutuksen ja reagoi suurella vääntömomentilla pyörimällä kierrosluvulla, joka määritetään kelojen väliseen taajuuteen sähkötulolla.
Rinnakkaisvaikutuksen tuottama pyörimisvaikutus voidaan ymmärtää viittaamalla alla olevaan kaavioon.
Oletetaan nyt, että kelan sisäänmenon alkuperäinen hetkellinen taajuusnapaisuus vetää roottoria ja kohdistaa roottorin A- ja B-varret staattorin 1 ja 2 pinnan kanssa aiheuttaen myötäpäivän liikkeen ....
seuraava hetki heti kun kelan napaisuus muuttuu, yllä olevaa myötäpäivään suuntautuvaa liikettä vahvistetaan, kun 'yhdensuuntaisen polun' magneettiveto yrittää kohdistaa roottorin C- ja D-varret staattorin 3/4 pintoihin ... seuraava napaisuuden muutos toistaa edellisen kohdistusmenettelyn.
Edellä selitetty jatkuva magneettinen vaikutus (jota tukee erinomainen rinnakkaistien tekniikka) pakottaa roottorin käymään läpi voimakkaan pyörimisliikkeen, jonka hyötysuhde ylittää 100%: n rajan.
Viitattu poikkeuksellinen vääntömomentti syntyy yhdensuuntaisen polun vaikutuksesta, jonka kautta suhteellisen heikompi sähkötulo saa suljettujen kestomagneettien magneettikentät keskittymään vuorotellen molemmille puolille varmistaen, että vastakkaiselle puolelle kohdistuu nollavoima samanaikaisesti.
Yllä olevan kääntämisen nopeus määräytyy sähköisen tulon taajuudella käämityksen yli.
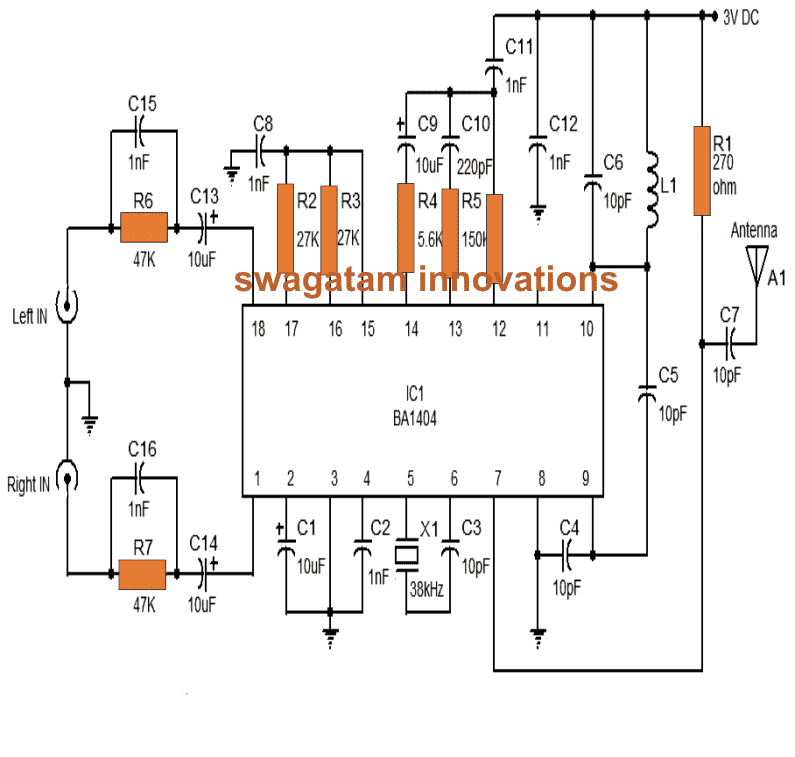
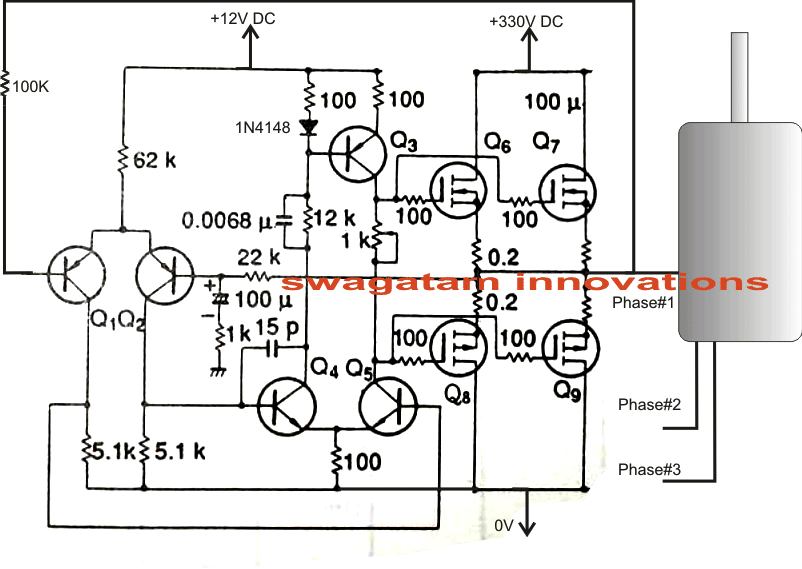
Flynn-moottorikaavio

Kuinka tehdä kääntöpiiri
Staattorikelojen kiikku tai vaihtoehtoinen kytkentä voidaan toteuttaa yksinkertaisesti käyttämällä alla esitettyä piiriä.
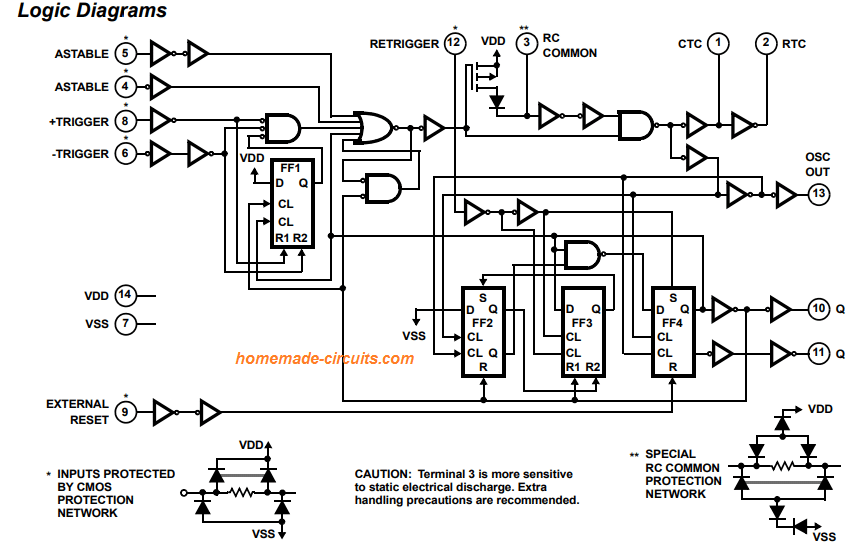
Piiri ei ole lainkaan monimutkainen, koko kokoonpano on rakennettu IC 4047: n ympärille ja kytkentä tapahtuu kahden mosfetin avulla.
Kelan keskihana voidaan nähdä päättyneen positiiviseksi, kun taas kelojen johtojen päät on kytketty mosfetin viemäriin.
Kierroslukua voidaan ohjata esitetyn potin avulla.
Flip Flop -kaavio

Varotoimet ennen Flynn-moottorin rakentamista
Muutama asia, joka on otettava huomioon rakennettaessa yllä selitetty Flynn-moottori.
- Testiprototyypin mitat eivät saa ylittää normaalin puhallinmoottorin mittoja.
- Magneettien ei pitäisi olla liian vahvoja, nyrkkisääntönä on valita poikkileikkauspinta-ala, joka voi olla 50% pienempi kuin staattorin ympäröivä pinta.
- Kierroslukua ei saa tehdä liian nopeaksi, Flynn-moottorin sanotaan toimivan parhaiten pienemmillä kierrosluvuilla, joissa se pystyy tuottamaan poikkeuksellisia vääntömomentteja verrattuna syötettyyn sähkötuloon.
- Roottorin ja staattorin pintojen välinen rako ei saa ylittää 0,5 mm: n merkkiä.
Edellinen: DTMF-pohjainen FM-kaukosäädinpiiri Seuraava: 220 V: n SMPS-matkapuhelimen laturi