Artikkelissa käsitellään yksinkertaista infrapunaohjattua puhaltimen säätö- tai himmenninpiiriä, jossa käytetään tavallisia osia, kuten 4017 IC ja 555 IC.
Piirin käyttö
Viitaten esitettyyn kauko-ohjattuun tuulettimen himmenninpiiriin voidaan nähdä kolme päävaihetta: infrapunasignaalianturin porras IC: n avulla TSOP1738 , Johnsonin vuosikymmenen laskuri, sekvensseri, joka käyttää IC 4017: tä, ja PWM-prosessorivaihe, jossa käytetään IC 555: tä.

Piirin eri toiminnot voidaan ymmärtää seuraavien kohtien avulla:
Kun infrapunasäde kohdistetaan anturiin, anturi tuottaa matalan logiikan vastauksena tähän, mikä puolestaan saa PNP BC557: n johtamaan.
Sensorin TSOP1738 käyttäminen
Tässä käytetty anturi on TSOP1738, josta saat lisätietoja tästä yksinkertainen infrapunakaukosäädinartikkeli
BC557-transistorin johtaminen vasteena IR-säteelle yhdistää positiivisen syötön IC 4017: n napaan 14, jonka IC hyväksyy kellopulssiksi.
Tämä kellopulssi muunnetaan yhdeksi peräkkäiseksi korkean logiikan hyppyksi olemassa olevasta pinoutista seuraavaan seuraavaan pinoutiin järjestyksessä IC 4017: n esitettyjen ulostulojen yli.
Tämä suuren logiikkapulssin peräkkäinen siirto tai siirtyminen yhdestä pinoutista toiseen koko ulostulojen kautta nastasta # 3 nastaan # 10 ja takaisin suoritetaan vasteena jokaiselle hetkelliselle säteelle, joka on keskitetty IR-anturiin IR-kaukosäätimellä.
IC 4017: n käyttö jännitteenjakajan ohjaamiseen
Voimme nähdä, että IC 4017 -lähdöissä on joukko tarkasti laskettuja vastuksia, joiden ulommat vapaat päät ovat oikosulussa ja kytketty maahan 1K-vastuksen kautta.
Yllä oleva konfiguraatio muodostaa resistiivisen potentiaalijakajan, joka tuottaa peräkkäisen potentiaalitasojen kasvun tai pudotuksen solmussa A vastauksena korkean logiikan siirtymiseen lähtöjen yli, kuten edellä selitettiin.
Tämä vaihteleva potentiaali päättyy NPN-transistorin pohjaan, jonka emitterin voidaan nähdä kytkettynä IC 555: n napaan # 5, joka on konfiguroitu suurtaajuiseksi pysyväksi.
IC 555: n käyttö PWM-generaattorina
555-vaihe toimii periaatteessa kuin PWM-generaattori, joka vaihtelee suhteellisesti, kun sen nastan # 5 potentiaali vaihtelee. Vaihtelevat PWM: t luodaan sen tapaan # 3.
Oletusarvoisesti nasta # 5 on kytketty 1K-vastukseen maahan, mikä varmistaa, että kun nastassa # 5 ei ole jännitettä tai vähimmäisjännitettä, seurauksena on erittäin kapeat PWM: t nastassaan # 3 ja potentiaalina tai jännitteenä nastassaan # 5 PWM: t saavat myös leveyden suhteellisesti. Leveys on suurin, kun tapin # 5 potentiaali saavuttaa 2/3: n tapin # 4/8 Vcc: stä.
Nyt ilmeisesti, kun IC: n 4017 lähdöt siirtyvät luoden vaihtelevaa jännitettä NPN: n pohjaan, vastaava määrä vaihtelevaa jännitettä siirretään IC 555: n nastalle # 5, joka puolestaan muuttuu vastaavasti muuttuvaksi PWM: ksi pin: n yli # 3 IC: stä.
Koska IC: n nasta # 3 on kytketty triacin porttiin, triacin johtokykyyn vaikuttaa suhteellisesti korkeasta matalaan ja päinvastoin vastauksena muuttuviin PWM: iin portinsa yli.
Tämä muunnetaan tehokkaasti halutuksi nopeuden säätöksi tai liitetyn tuulettimen sopivaksi säätöksi triacin MT1: n ja AC-verkkotulon poikki.
Tällöin puhaltimen nopeus muuttuu nopeasti hitaaksi ja päinvastoin vastauksena piirin siihen liittyvään infrapunatunnistimeen vaihdettuihin infrapuna-infrapunasäteisiin.
Piirin asettaminen.
Se voidaan tehdä seuraavien vaiheiden avulla:
Pidä aluksi BC547-transistorin emitteri irrotettuna IC555: n nastasta # 5.
Nyt voidaan olettaa, että nämä kaksi vaihetta (IC 4017 ja IC 555) ovat erillään toisistaan.
Tarkista ensin IC 555 -vaihe seuraavalla tavalla:
1K-vastuksen irrotus nastasta # 5 ja maadoituksesta pitäisi lisätä puhaltimen nopeutta maksimiin ja liittämällä se takaisin pienentää sitä minimiin.
Edellä oleva vahvistaa IC 555 PWM -vaiheen oikean toiminnan.
50 k: n esiasetusasetus ei ole ratkaiseva, ja se voidaan asettaa suunnilleen esiasetetun alueen keskelle.
Kondensaattoria 1nF voitaisiin kuitenkin kokeilla parhaan mahdollisen lopputuloksen saamiseksi. Suurempia arvoja, jopa 10uF, voidaan kokeilla ja tuloksia seurata, jotta puhaltimen nopeuden säätö olisi mahdollisimman edullinen.
Seuraavaksi meidän on tarkistettava, luo IC: n 4017 lähtösolmu kohdassa 'A' vaihtelevaa jännitettä 1 V - 10 V vasteena jokaiseen IR-kauko-säteen painamiseen piirin IR-anturin yli.
Jos yllä oleva ehto täyttyy, voidaan olettaa, että porras toimii oikein, ja nyt BC547: n emitteri voidaan integroida IC555: n nastaan # 5 tuulettimen nopeuden säätämisen lopullista testausta varten IR-kaukosäätimellä.
Kaukopuhelin voi olla mikä tahansa television kaukosäädin, jota yleensä käytämme kodeissamme.
Jos yllä oleva rakenne ei toimi sujuvasti yhdistetyn tuulettimen kanssa, tulosten parantamiseksi on ehkä tehtävä pieni muutos alla esitetyllä tavalla:

Piiri hyödyntää MOC3031-triac-ohjaimen vaihetta, jotta tuuletinohjaus voidaan toteuttaa vaivattomasti ja puhtaasti kauko-ohjaimen kautta.
Testianalyysi
Edellä mainitun piirin testauksessa tulokset eivät olleet aivan tyydyttäviä, koska puhallinta ei voitu ohjata alimpaan rajaan saakka ja se osoitti jonkin verran tärinää.
Suunnittelua analysoitaessa paljastui, että PWM: n soveltaminen triaciin aiheutti ongelman, koska triakit eivät reagoi hyvin DC PWM: iin, pikemminkin osoittavat parantuneita reaktioita AC-vaiheen pilkkomiseen himmentimissä käytettynä
Vaiheohjauksen käyttäminen PWM: n sijaan
Tässä artikkelissa käsitelty piiri eliminoi tuulettimen himmennyksen ohjauksen PWM-idean, vaan käyttää muutamia pienitehoisia triakeja kytketyn tuulettimen moottorin himmennys- tai nopeusvaikutuksen toteuttamiseksi peräkkäin.
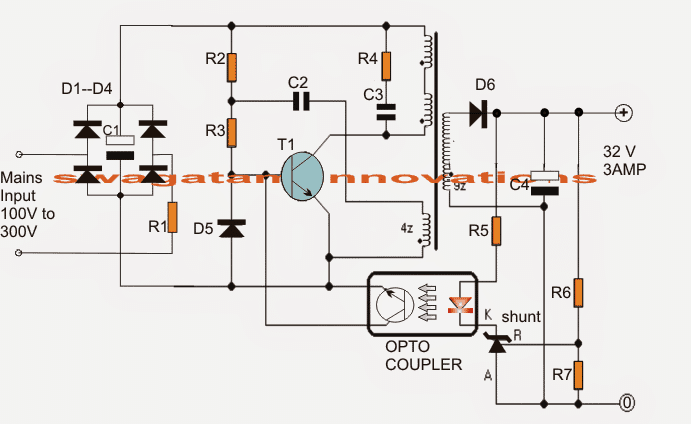
Ehdotetun kauko-ohjatun tuulettimen himmenninpiirin täydellinen suunnittelu näkyy seuraavassa:
Piirikaavio

Huomaa: 4 SCR: ää on väärin esitetty SCR BT169: nä, ne on korvattava triakeilla, kuten BCR1AM-8P-triakeilla, tai mikä tahansa muu vastaava triac tekee myös.
Kuinka se toimii
Viitaten yllä olevaan kaavioon voimme nähdä kaksi piiriä, jotka on konfiguroitu pari erillistä vaihetta.
Kaavion oikea puoli on määritetty a vakio-himmennin tai tuulettimen himmenninpiiri , lukuun ottamatta yhtä muutosta, joka voidaan nähdä lähellä sen tavanomaista potin osaa, jossa se on korvattu neljällä triaksilla, joiden MT2: ssa on neljä erillistä vastusta, järjestettynä kasvavilla arvoilla.
IC 4017: n käsittävä vasemmanpuoleinen vaihe on kytketty 4-vaiheisena peräkkäisenä logiikkageneraattorina, jonka laukaisee infrapuna-anturiyksikkö, joka muodostaa IR-vastaanottimen kytkentälaukaisujen vastaanottamiseksi kädessä pidettävästä IR-kaukosäätimestä.
Varajäsen infrapunalähettimien kaukosäätimet saa IRS: n generoimaan vaihtopulssin IC 4017: n napaan # 14, mikä puolestaan muuntaa pulssin peräkkäin siirtyväksi logiikan korkeaksi pulssiksi tapinsa # 3 kautta tapiin # 10, minkä jälkeen se palautetaan takaisin tapiin # 3 tapin kautta # 1/15 vuorovaikutus.
Yllä olevat pinoutit, jotka ovat vastuussa peräkkäin kulkevan loogisen korkean pulssin muodostamisesta, on kytketty sarjaan ilmoitettujen triakkien portteihin A, B, C, D.
Koska triakkien anodeihin liitetyistä vastuksista tulee puhaltimen nopeusrajoituksen määrittäviä komponentteja, tämä tarkoittaa, että vaihtamalla triakkia peräkkäin edestakaisin, puhaltimen nopeutta voidaan lisätä tai vähentää suhteellisesti neljässä erillisessä vaiheessa riippuen R4 ---- R8: n arvot.
Siksi, kun kaukosäätimen painiketta painetaan, IC 4017 -näppäimet laukaisevat vastaavan triacin, joka puolestaan yhdistää anodivastuksensa himmentimen triac / diac-kokoonpanoon suorittamalla asianmukainen määrä tuulettimen nopeutta.
Ehdotetussa kauko-ohjatussa tuulettimen himmenninpiirissä on esitetty 4 triakkia 4-portaisen nopeuden ohjauksen tuottamiseksi, mutta 10 tällaista triakkia voitaisiin toteuttaa IC 4017: n kaikilla 10 nastalla hyvän 10-vaiheisen diskreetin ohjatun tuulettimen nopeuden säätämisen aikaansaamiseksi.
Osaluettelo
R1, R3 = 100 ohmia, R2 = 100K, R4 = 4K7, R5 = 10K,
C2 = 47uF / 25VC1, C4 = 22uF / 25V, C6 = 4.7uF / 25V,
C3 = 0,1, KERAAMINEN
C5 = 100uF / 50V
C10 = 0,22 uF / 400 V
T1 = BC557
IRS = TSOP IR -anturi
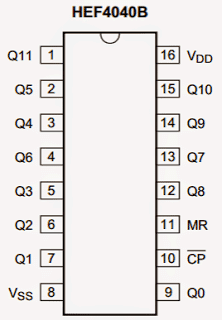
IC1 = 4017 IC
D1 = 1N4007
D2 = 12 V 1 watin zener
R9 = 15K
R10 = 330K
R4 --- R8 = 50K, 100K. 150K, 220K
R11 = 33K
R12 = 100 ohmia
Diac = DB-3
TR1 = BT136
L1 = 500 kierrosta 28SWG: tä minkä tahansa rautapultin yli.
C7 = 0,1 uF / 600 V
VAROITUS: KOKO VIRTA ON SUORAAN LIITETTY PÄÄVIRTAIN, HAVAA ERITTÄIN VAROITUSTA TESTIEN VIRTAA VIRRALLA
Pari: Lelumoottoripiiri, jossa on ajastettu peruutus eteenpäin Seuraava: Veden virtausventtiilin ajastimen ohjauspiiri