Tässä artikkelissa kuvattua virtapiiriä ja mekanismia voidaan pitää helpoimpana ja täydellisinä kaksiakselisena aurinkokennojärjestelmänä.
Dual Axis Solar Tracker -konseptin toiminta
Laite pystyy seuraamaan auringon päivittäistä liikettä tarkasti ja siirtymään pystyakselilla vastaavasti. Laite seuraa myös tehokkaasti auringon kausiluonteista siirtymää ja siirtää koko mekanismia vaakasuorassa tasossa tai sivuttaisliikkeessä siten, että aurinkopaneelin suunta pidetään aina suorassa akselissa auringon kanssa, jotta se täydentää pystysuuntaisia toimintoja seurannan asianmukaisesti.
Kuten kuvasta näkyy, tässä voidaan nähdä suhteellisen helppo mekanismi. Aurinkokenno on periaatteessa asennettu parin jalustan päälle, jossa on liikkuva keskiakseli.
Keskeisen järjestelyn ansiosta paneelin kiinnikkeet voivat liikkua pyöreällä akselilla lähes 360 astetta.
Kaavion mukainen moottorivaihteisto on asennettu juuri akselin kulmaan siten, että kun moottori pyörii, koko aurinkopaneeli siirtyy suhteellisesti keskitapinsa ympäri joko vastapäivään tai myötäpäivään, riippuen moottorin liikkeestä. moottori, joka puolestaan riippuu auringon sijainnista.
Kuinka LDR-piiri toimii
LDR: ien sijainti on tässä kriittinen ja tätä pystytason liikettä vastaava LDR-joukko on sijoitettu niin, että se tunnistaa aurinkovalon tarkasti ja yrittää pitää paneelin kohtisuorassa aurinkosäteisiin liikuttamalla moottoria sopivassa suunnassa tietty määrä porrastettuja kierroksia.
LDR-tunnistuksen vastaanottaa ja tulkitsee oikeastaan tarkasti elektroninen piiri, joka käskee moottoria yllä selitetyille toiminnoille.
Toinen mekanismi, joka on melko samanlainen kuin yllä oleva pystysuora asetus, mutta liikuttaa paneelia sivuttaisliikkeellä tai pikemminkin siirtää koko aurinkopaneelin kiinnikkeen pyörivällä liikkeellä vaakatason yli.
Tämä liike tapahtuu vastauksena auringon asemaan kausivaihteluiden aikana, joten toisin kuin pystysuuntaiset liikkeet, tämä toiminta on hyvin asteittaista eikä sitä voi kokea päivittäin.
Jälleen yllä oleva liike on vastaus elektronisen piirin moottorille antamaan komentoon, joka toimii vastauksena LDR: ien tekemään tunnistukseen.
Edellä mainittua menettelyä varten käytetään erilaista LDR-sarjaa, joka asennetaan vaakasuoraan paneelin päälle tiettyyn kohtaan kaavion mukaisesti.
Kuinka Solar Tracker OpAmp -ohjauspiiri toimii
Kaaviossa esitetyn piirin huolellinen tutkimus paljastaa, että koko kokoonpano on itse asiassa hyvin yksinkertainen ja suoraviivainen. Tässä käytetään yhtä IC 324: ää ja vain kahta sen opampista käytetään vaadittuihin toimintoihin.
Opampit on ensisijaisesti kytketty muodostamaan eräänlainen ikkunavertailija, joka on vastuussa lähtöjensa aktivoimisesta aina, kun heidän tulonsa heiluvat tai ajautuvat ulos ennalta määrätystä ikkunasta, jonka asianomaiset ruukut asettavat.
Kaksi LDR: ää on kytketty opampien tuloihin valon tason tunnistamiseksi. Niin kauan kuin valot kahden LDR: n päällä ovat tasaiset, opampin lähdöt pysyvät deaktivoituna.
Kuitenkin tällä hetkellä, kun yksi LDR: stä havaitsee eri valon voimakkuuden sen yli (mikä voi tapahtua auringon muuttuvan sijainnin vuoksi), tasapaino opamp-siirtymän tulon suhteen kohti yhtä suuntaa, mikä tekee asiaankuuluvien opampien lähdön välittömästi korkeaksi.
Tämä korkea teho aktivoi välittömästi täydellisen sillan transistoriverkon, joka vuorostaan kiertää liitettyä moottoria asetetussa suunnassa siten, että paneeli pyörii ja säätää kohdistustaan aurinkosäteiden kanssa, kunnes tasainen valon määrä palautuu vastaavan LDR-sarjan yli.
Kun asiaankuuluvien LDR-sarjojen valotaso on palautunut, opampit taas lepotilassa ja sammuttavat lähdöt ja myös moottorin.
Yllä oleva järjestys jatkuu koko päivän, vaiheittain, kun aurinko muuttaa sijaintiaan ja yllä oleva mekanismi liikkuu jatkuvasti aurinkojen asennon mukaan.
On huomattava, että kahta yllä kuvattujen piirikokoonpanojen sarjaa tarvitaan kaksoistoimintojen ohjaamiseksi tai yksinkertaisesti yllä mainitun kaksoisreitittimen aurinkokunnan mekanismin tekemiseksi.
Osaluettelo
- R3 = 15K,
- R4 = 39K,
- P1 = 100K,
- P2 = 22K,
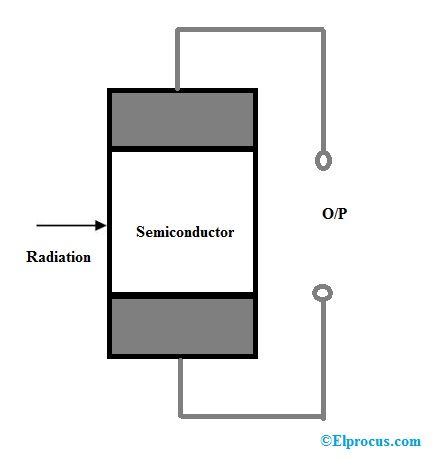
- LDR = Normaali tyyppi, jonka vastus on noin 10 K - 40 K päivänvalossa varjossa ja ääretön vastus täydellisessä pimeydessä.
- Op-vahvistimet ovat IC 324: stä tai erikseen kaksi 741 IC: tä voidaan myös sisällyttää.
- T1, T3 = TIP31C,
- T2, T4 = TIP32C,
- Kaikki diodit ovat 1N4007
- Moottori = Aurinkopaneelin kuormituksen ja koon mukaan
Kohteliaisuus - Elector Electroniks India
Kuinka lisätä asetettu / palautettu toiminto yllä olevaan piiriin
Ensi silmäyksellä saattaa näyttää siltä, että yllä olevassa piirissä ei ole automaattista nollausominaisuutta. Lähempi tutkimus osoittaa kuitenkin, että itse asiassa tämä piiri nollautuu automaattisesti aamunkoiton alkaessa tai aamupäivällä.
Tämä saattaa olla totta johtuen siitä, että LDR: t on sijoitettu koteloiden sisään, jotka on erityisesti suunniteltu V-muotoon tämän toiminnan helpottamiseksi.
Nousevan auringon valon heijastumisesta aamuyönäisin taivas valaisee enemmän kuin maa. Koska LDR: t on sijoitettu V-tavalla, LDR, joka on enemmän taivasta kohti, saa enemmän valoa kuin LDR, joka on kohti maata. Tämä tilanne aktivoi moottorin vastakkaiseen suuntaan siten, että se pakottaa paneelin kääntymään varhain aamulla.
Kun paneeli palaa itään, asiaankuuluva LDR alkaa altistua yhä enemmän ympäröivälle valolle nousevasta auringonvalosta, mikä työntää paneelia vielä voimakkaammin itään, kunnes molemmat LDR ovat melkein suhteellisesti alttiina kohti itään nousevaa auringonvaloa, tämä palauttaa täysin paneeli niin, että prosessi alkaa alusta alusta.
Aseta Palauta-toiminto
Jos asetettu palautusominaisuus tulee välttämättömäksi, voidaan sisällyttää seuraava malli.
Asetuskytkin asetetaan seurannan aurinkoiseen päähän siten, että se masentuu, kun paneeli lopettaa päivän seurannan.
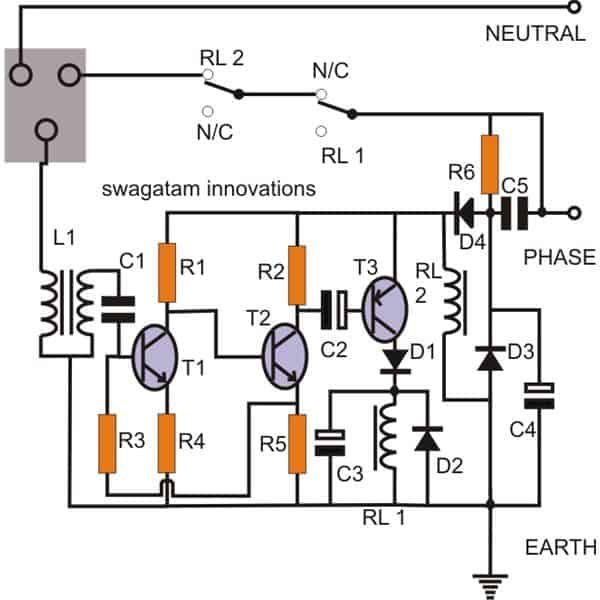
Kuten alla olevasta kuvasta nähdään, syöttö seurantapiiriin annetaan DPDT-releen N / C-pisteistä, mikä tarkoittaa, että kun SET-kytkintä painetaan, rele aktivoi ja katkaisee virran niin, että koko yllä olevassa artikkelissa esitetty piiri katkaistaan nyt eikä häiritse.
Samanaikaisesti moottori vastaanottaa peruutusjännitteen N / O-koskettimien kautta, jotta se voi aloittaa paneelin peruutusprosessin alkuperäiseen asentoonsa.
Kun paneeli on päättänyt peruutusprosessin kohti 'auringonnousun' päätä, se työntää sopivasti jonnekin tähän päähän sijoitettua nollauskytkintä, tämä toiminto deaktivoi releen ja palauttaa koko järjestelmän uudelleen seuraavaa jaksoa varten.
Edellinen: Tee yksinkertaisin lämpötilan ilmaisinpiiri Seuraava: Aurinkopaneelin jännitteen säätimen piiri