Tämä ehdotetun 4kva: n ensimmäinen osa on synkronoitu pinottava invertteripiiri keskustelee siitä, miten taajuuden, vaiheen ja jännitteen suhteen toteutetaan ratkaiseva automaattinen synkronointi neljän taajuusmuuttajan välillä, jotta taajuusmuuttajat pysyisivät toisistaan riippumattomina mutta saavuttaisivat samalla tasolla olevan lähdön.
Idean pyysi David. Seuraava hänen ja minun välinen sähköpostikeskustelu kertoo ehdotetun synkronoidun 4kva-pinottavan invertteripiirin päätiedot.
Sähköposti # 1
Hei Swagatam,
Ensinnäkin halusin sanoa kiitos panoksestasi koko maailmaan, tiedot ja ennen kaikkea halukkuutesi jakaa tietosi auttaakseni muita ihmisiä on mielestäni korvaamaton monista syistä.
Haluaisin parantaa joitain jakamiasi piirejä omiin tarkoituksiini, mutta valitettavasti vaikka ymmärrän piireissä tapahtuvaa, minulta puuttuu luovuus ja tietämys tehdäkseni muutokset itse.
Voin yleensä seurata piirejä, jos ne ovat pieniä, ja näen, missä ne liittyvät / yhdistyvät suurempiin kaavioihin.
Haluan yrittää selittää, mitä haluaisin saavuttaa, vaikka minulla ei ole illuusioita siitä, että olet hyvin kiireinen ihminen etkä halua viettää arvokasta aikaa turhaan.
Lopullinen tavoite olisi, että haluaisin rakentaa (koota komponentit) monilähteisen uusiutuvan energian mikroverkon käyttäen Solar PV-, tuulimylly- ja biodieselingeneraattoreita.
Ensimmäinen vaihe on aurinkosähkömuuntimen parannukset.
Haluaisin käyttää 48 voltin puhdasta siniaaltoinvertteripiiriäsi, joka kykenee ylläpitämään vakiona 2 kW: n 230 V: n lähtöä, sen on kyettävä tuottamaan vähintään 3 kertaa tämä lähtö erittäin lyhyeksi ajaksi.
Avaimen muokkaus, jonka haluan saavuttaa, luoda useita näistä taajuusmuuttajayksiköistä toimimaan rinnakkain ja kytkettynä vaihtovirtakiskoon.
Haluaisin, että jokainen taajuusmuuttaja näyttäisi itsenäisesti ja jatkuvasti vaihtovirtakiskon taajuuden, jännitteen ja virran (kuormituksen) suhteen.
Kutsun näitä taajuusmuuttajia orjayksiköiksi.
Käänteismoduulien idea on 'plug and play'.
Kun vaihtovirtakiskoon kytketty taajuusmuuttaja näyttäisi / mittaa jatkuvasti vaihtovirtakiskon taajuutta ja käyttäisi näitä tietoja 4047 IC: n tulon ohjaamiseen siten, että sen kellolähtöä voidaan edetä tai hidastaa, kunnes se kloonaa tarkasti taajuuden vaihtovirtakiskopalkki, kun molemmat aaltomuodot on synkronoitu, taajuusmuuttaja sulkee kontaktorin tai releen, joka yhdistää invertin lähtöasteen vaihtovirtakiskoon.
Siinä tapauksessa, että tangon taajuus tai jännite siirtyy ennalta määritetyn toleranssin ulkopuolelle, invertterimoduulin tulisi avata lähtövaiheen rele tai kontaktori, joka tosiasiallisesti irrottaa taajuusmuuttajan lähtöasteen vaihtopalkista itsensä suojaamiseksi.
Lisäksi kun kytketty vaihtovirtakiskoon, orjayksiköt menisivät nukkumaan tai ainakin invertterin ulostulovaihe nukkuisi samalla kun tangon kuormitus on pienempi kuin kaikkien orjainvertterien summa. Kuvittele, jos AC-väyläpalkkiin on kiinnitetty 3 orjainvertteriä, mutta tangon kuormitus on vain 1,8 kW, sitten kaksi muuta orjaa menisivät nukkumaan.
Vastavuoroinen olisi myös totta, että jos tangon kuormitus hyppää sanomaan 3 kW: n, yksi nukkuvista käänteisistä heräisi välittömästi (jo synkronoituna) toimittamaan tarvittavaa energiaa.
Kuvittelen, että kussakin lähtövaiheessa jotkut suuret kondensaattorit toimittavat tarvittavan energian, kun taas taajuusmuuttajalla on hyvin lyhyt hetki, kun se herää.
Olisi parempi (vain mielestäni) olla kytkemättä kutakin taajuusmuuttajaa suoraan toisiinsa, vaan pikemminkin, että ne ovat itsenäisesti itsenäisiä.
Haluan yrittää välttää mikro-ohjaimia tai yksiköiden virheitä tai vikoja, jotka tarkistavat toisiaan tai yksiköitä, joilla on ”osoite” järjestelmässä.
Mielessäni kuvittelen, että AC-väyläpalkin ensimmäinen liitetty laite olisi erittäin vakaa vertailumuunnin, joka on jatkuvasti kytketty.
Tämä vertailumuuntaja antaisi taajuuden ja jännitteen, joita muut orjayksiköt käyttäisivät omien vastaavien lähtöjensä tuottamiseen.
Valitettavasti en pääse käsiksi, kuinka voisit estää takaisinkytkentäsilmukan, jossa orjayksiköistä kullakin mahdollisesti päätyisi vertailuyksikkö.
Tämän sähköpostiviestin ulkopuolella minulla on joitain pieniä generaattoreita, jotka haluaisin liittää vaihtovirtakiskoon, joka synkronoituu referenssimuuttajaan energian toimittamiseksi siinä tapauksessa, että kuorma ylittää DC max -lähtökapasiteetin.
Lähtökohtana on, että vaihtovirtakiskolle ilmoitettu kuorma määrittäisi, kuinka monta taajuusmuuttajaa ja lopulta kuinka monta generaattoria joko itsenäisesti kytketään tai irrotetaan kysynnän tyydyttämiseksi, koska tämä toivottavasti säästää energiaa tai ainakaan ei tuhlaa energiaa.
Täysin useista moduuleista rakennettu järjestelmä olisi tällöin laajennettavissa / kokoonpanokelpoinen sekä vankka / joustava siten, että jos joku tai kenties kaksi yksikköä epäonnistuu, järjestelmä toimisi edelleen, olipa se pienemmällä kapasiteetilla.
Olen liittänyt lohkokaavion ja sulkenut akun lataamisen toistaiseksi pois.
Aion ladata akkupankin vaihtoväylältä ja tasasuuntaa 48 V DC: lle tällä tavoin voin ladata generaattoreilta tai uusiutuvista energialähteistä, tiedän, että tämä ei ehkä ole yhtä tehokasta kuin DC mppt: n käyttö, mutta luulen mitä minä menettää tehokkuutta saan joustavuutta. Asun kaukana kaupungista tai sähköverkosta.
Vertailun vuoksi vaihtovirtakiskon vakiokuormitus olisi vähintään 2 kW, vaikka huippukuorma voisi nousta jopa 30 kW.
Suunnitelmani on, että aurinkosähköpaneelit tuottavat ensimmäisen 10–15 kW: n tehon ja kaksi 3 kW: n (huippu) tuulimyllyä tuulimyllyt ovat villiä AC-tasasuuntaajia ja 1000 Ah 48 voltin akkupankki. (Joten haluaisin välttää tyhjenemisen / purkautumisen yli 30 prosentin kapasiteetista akun käyttöiän varmistamiseksi) generaattorini tyydyttävät jäljellä olevan harvinaisen ja erittäin ajoittaisen energiantarpeen.
Tämä harvinainen ja ajoittainen kuorma tulee työpajastani.
Olen ajatellut, että voi olla järkevää rakentaa kondensaattoripankki käsittelemään tai poimimaan mahdollisen induktiivisen kuorman käynnistysvirran, kuten ilmakompressorin ja pöytäsahan, moottori.
Mutta en ole tällä hetkellä varma, onko parempaa / halvempaa tapaa.
Sinun ajatuksesi ja kommenttisi olisivat suuresti arvostettuja ja arvostettuja. Toivon, että sinulla on aikaa palata luokseni.
Kiitos ajastasi ja huomiosi etukäteen.
Ystävällisin terveisin David lähetetty langattomalta BlackBerry®-laitteeltani
Oma vastaus
Hei David,
Olen lukenut vaatimuksesi ja toivottavasti ymmärtänyt sen oikein.
Neljästä vaihtosuuntaajasta vain yhdellä olisi oma taajuusgeneraattorinsa, kun taas toiset toimisivat ottamalla taajuuden tältä invertterilähdöltä, ja siten kaikki olisivat synkronoituja toistensa ja tämän isäntämuuntajan teknisten tietojen kanssa.
Yritän suunnitella sen ja toivon, että se toimii odotetulla tavalla ja mainitsemiesi ominaisuuksien mukaisesti, mutta toteutus on kuitenkin suoritettava asiantuntijalla, jonka pitäisi pystyä ymmärtämään konsepti ja muokkaamaan / muokkaamaan sitä täydelliseksi missä tahansa. vaaditaan .... muuten tämän kohtuullisen monimutkaisen suunnittelun onnistuminen voi tulla erittäin vaikeaksi.
Voin esittää vain peruskonseptin ja kaavion .... loput insinöörit tarvitsevat sinun puoleltasi.
Voi kestää jonkin aikaa valmistua, koska minulla on jo useita odottavia pyyntöjä jonossa ... Ilmoitan sinulle pojana, kun se on lähetetty
Ystävällisin terveisin Swag
Sähköposti # 2
Hei Swagatam,
Kiitos paljon nopeasta vastauksestasi.
Se ei ollut aivan mielessäni, mutta edustaa varmasti vaihtoehtoa.
Ajattelin, että jokaisella yksiköllä olisi kaksi taajuuden mittauksen alipiiriä, yksi, joka tarkastelee vaihtovirtakiskon taajuutta ja tätä yksikköä käytetään luomaan kellopulssi invertterin siniaaltogeneraattorille.
Toinen taajuuden mittauksen alipiiri tarkastelee taajuusmuuttajan siniaaltogeneraattorin lähtöä.
Olisi vertailupiiri, joka käyttää ehkä opamp-ryhmää, joka syöttäisi takaisin invertterin siniaaltogeneraattorin kellopulssiin kellosignaalin eteenpäin viemiseksi tai kellosignaalin hidastamiseksi, kunnes siniaaltogeneraattorin lähtö vastasi tarkalleen AC-palkin siniaaltoa .
Kun invertterin lähtöasteen taajuus vastasi vaihtovirtakiskon taajuutta, olisi SSR, joka sulkisi invertterin lähtöasteen kytkemisen vaihtopalkkiin mieluiten nollapisteen yli.
Tällä tavoin mikä tahansa invertterimoduuli saattaa epäonnistua ja järjestelmä toimisi edelleen. master-invertterin tarkoitus oli, että kaikista invertterimoduuleista se ei koskaan menisi nukkumaan ja että se tarjoaisi alkuperäisen vaihtotaajuuden. kuitenkin, jos se epäonnistuu, se ei vaikuta muihin yksiköihin, kunhan yksi on verkossa
Orjayksiköiden tulisi sammua tai käynnistyä kuorman muuttuessa.
Havaintosi oli oikea. En ole elektroniikan mies. Olen mekaniikka- ja sähköinsinööri. Työskentelen suurten laitostuotteiden, kuten jäähdyttimien, generaattorien ja kompressorien kanssa.
Kun tämä projekti etenee ja alkaa tulla konkreettisemmaksi, olisitko halukas / avoin hyväksymään rahalahja? Minulla ei ole paljon, mutta voisin ehkä lahjoittaa rahaa paypalin kautta, jotta voin tukea verkkosivustosi isännöintikustannuksia.
Kiitos jälleen.
Odotan innolla kuulevani sinusta.
namaste
David
Oma vastaus
Kiitos David,
Pohjimmiltaan haluat taajuusmuuttajien olevan synkronoituja toistensa kanssa taajuuden ja vaiheen suhteen, ja myös jokaisella, jolla on kyky tulla pääinvertteriksi ja ottaa varaus, jos edellinen epäonnistuu jostain syystä. Eikö?
Yritän korjata tämän kaikilla tiedoilla, joita minulla on, ja jollakin järjellä, enkä käyttämällä monimutkaisia IC: itä tai kokoonpanoja.
Lämpimin terveisin Swag
Sähköposti # 3
Hei Swag,
Siinä se mutterikuoressa, ottaen huomioon yksi lisävaatimus.
Kuorman pudotessa taajuusmuuttajat siirtyvät eko- tai valmiustilaan ja kuorman kasvaessa tai noustessa ne heräävät vastaamaan kysyntään.
Rakastan lähestymistapaa, jolla olet menossa ...
Kiitos paljon, että arvostat minua erittäin suuresti.
Namaste
Ystävällisin terveisin
David
Muotoilu
Herra Davidin pyynnön mukaan ehdotettujen 4 kva: n pinottavien virtamuuntajapiirien on oltava 4 erillisen taajuusmuuttajapiirin muodossa, jotka voidaan pinota sopivasti synkronoituna toisiinsa oikean määrän itsesäätyvän tehon toimittamiseksi liitettyyn riippuen siitä, kuinka nämä kuormat kytketään päälle ja pois päältä.
PÄIVITTÄÄ:
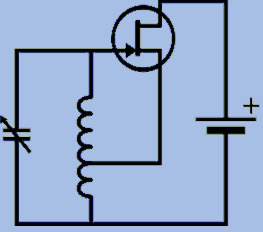
Harkittuani jonkin verran tajusin, että suunnittelun ei tarvitse olla liian monimutkainen, vaan se voidaan toteuttaa yksinkertaisen konseptin avulla, kuten alla on esitetty.

Vain IC 4017 yhdessä siihen liittyvien diodien, transistoreiden ja muuntajan kanssa on toistettava vaaditulle määrälle taajuusmuuttajia.
Oskillaattori on yksi kappale ja se voidaan jakaa kaikkien taajuusmuuttajien kanssa integroimalla sen pin3 IC 4017: n pin14: een.
Takaisinkytkentäpiiri on säädettävä tarkasti yksittäisille taajuusmuuttajille, jotta katkaisualue olisi täsmälleen sopiva kaikkien taajuusmuuttajien kanssa.
Seuraavat mallit ja selitykset voidaan jättää huomiotta, koska paljon helpompi versio on jo päivitetty yllä
Taajuusmuuttajien synkronointi
Tärkein haaste tässä on mahdollistaa jokaisen orjamuuntajan synkronointi isäntäinvertterin kanssa niin kauan kuin isäntäinvertteri on toiminnassa, ja jos (vaikka on epätodennäköistä) isäntäinvertteri epäonnistuu tai lakkaa toimimasta, seuraava taajuusmuuttaja ottaa käyttöön latautuu ja siitä tulee itse pääinvertteri.
Ja jos toinen invertteri myös epäonnistuu, kolmas invertteri ottaa komennon ja pelaa pääinvertterin roolia.
Itse asiassa taajuusmuuttajien synkronointi ei ole vaikeaa. Tiedämme, että se voidaan tehdä helposti käyttämällä IC: itä, kuten SG3525, TL494 jne. Suunnittelun vaikein osa on kuitenkin varmistaa, että jos isäntäinvertteri epäonnistuu, jostakin muusta taajuusmuuttajasta voi tulla nopeasti isäntä.
Ja tämä on suoritettava menettämättä taajuuden, vaiheen ja PWM: n hallintaa edes sekunnin erissä ja sujuvalla siirtymällä.
Tiedän, että ideoita voi olla paljon parempia, perustavanlaatuinen muotoilu mainittujen kriteerien täyttämiseksi on esitetty seuraavassa kaaviossa:

Yllä olevassa kuvassa näkyy pari identtistä vaihetta, joissa ylempi invertteri # 1 muodostaa isäntäinvertterin ja alempi invertteri # 2 orja.
Lisää vaiheita taajuusmuuttajan # 3 ja invertterin nro 4 muodossa on tarkoitus lisätä kokoonpanoon samalla identtisellä tavalla integroimalla nämä taajuusmuuttajat yksittäisiin optoerottimen vaiheisiinsa, mutta opamp-vaihetta ei tarvitse toistaa.
Suunnittelu koostuu pääasiassa IC 555 -pohjaisesta oskillaattorista ja IC 4013 -kiikapiiristä. IC 555 on kytketty tuottamaan kellotaajuuksia 100 Hz: n tai 120 Hz: n taajuudella, joka syötetään IC 4013: n kellotuloon, joka sitten muuntaa sen vaadittavaksi 50 Hz: ksi tai 60 Hz: ksi kääntämällä vuorotellen ulostulojaan logiikalla korkealla tapin # 1 yli. ja tappi # 2.
Näitä vaihtovirtalähtöjä käytetään sitten virtalähteiden aktivoimiseksi ja muuntajaa tarkoitetun 220 V: n tai 120 V: n AC: n muodostamiseksi.
Kuten aiemmin keskusteltiin, ratkaiseva asia tässä on kahden taajuusmuuttajan synkronointi niin, että ne pystyvät toimimaan täsmälleen tahdistettuna taajuuden, vaiheen ja PWM: n suhteen.
Aluksi kaikki mukana olevat moduulit (pinottavat invertteripiirit) säädetään erikseen tarkalleen identtisillä komponenteilla siten, että niiden käyttäytyminen on täysin samanlainen kuin toiset.
Jopa tarkasti sovitettujen ominaisuuksien ollessa kyseessä, invertterien ei voida odottaa toimivan täydellisesti synkronoituna, elleivät ne ole sidottu jollakin ainutlaatuisella tavalla.
Tämä tehdään itse asiassa integroimalla 'orja' -taajuusmuuttajat opamp / optoerottimen vaiheen läpi, kuten yllä olevassa kuviossa on esitetty.
Alun perin pääinvertteri # 1 kytketään päälle, mikä antaa opamp 741 -vaiheen virran ja aloittaa lähtöjännitteen taajuuden ja vaiheen seurannan.
Kun tämä on aloitettu, kaikki seuraavat invertterit kytketään päälle PÄÄLLE virran lisäämiseksi verkkojohtoon.
Kuten voidaan nähdä, opamp-lähtö on kytketty kaikkien orja-invertterien ajoituskondensaattoriin opto-kytkimen kautta, joka pakottaa orja-invertterit seuraamaan pääinvertterin taajuutta ja vaihekulmaa.
Mielenkiintoinen asia tässä on kuitenkin opampin lukitustekijä hetkellisillä vaihe- ja taajuusinformaatioilla.
Näin tapahtuu, koska kaikki taajuusmuuttajat toimittavat ja käyvät nyt määrätyllä taajuudella ja vaiheella pääinvertteristä, mikä tarkoittaa, että jos jokin taajuusmuuttaja epäonnistuu, mukaan lukien pääinvertteri, opamp pystyy seuraamaan ja injektoimaan hetkellisen taajuuden / vaihetiedot ja pakottaa olemassa olevat taajuusmuuttajat toimimaan näiden spesifikaatioiden mukaan, ja invertteri puolestaan pystyy ylläpitämään palautetta opamp-vaiheeseen, jotta siirtymät tekisivät saumattomiksi ja itsestään optimoidut.
Siksi toivottavasti opamp-vaihe hoitaa ensimmäisen haasteen pitää kaikki ehdotetut pinottavat invertterit täydellisesti synkronoituna käytettävissä olevan verkkomäärityksen LIVE-seurannan avulla.
Artikkelin seuraavassa osassa opimme synkronoitu PWM-siniaaltoaste , joka on edellä mainitun suunnittelun seuraava keskeinen piirre.
Tämän artikkelin edellisestä osasta opimme 4 kva: n synkronoidun pinottavan invertteripiirin pääosan, joka selitti suunnittelun synkronointitiedot. Tässä artikkelissa tutkitaan, kuinka suunnitelmasta tehdään siniaallon vastaava ja varmistetaan myös PWM: ien oikea synkronointi mukana olevien taajuusmuuttajien välillä.
Synkronoi siniaalto PWM taajuusmuuttajien välillä
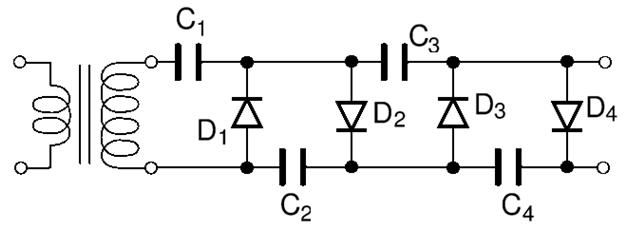
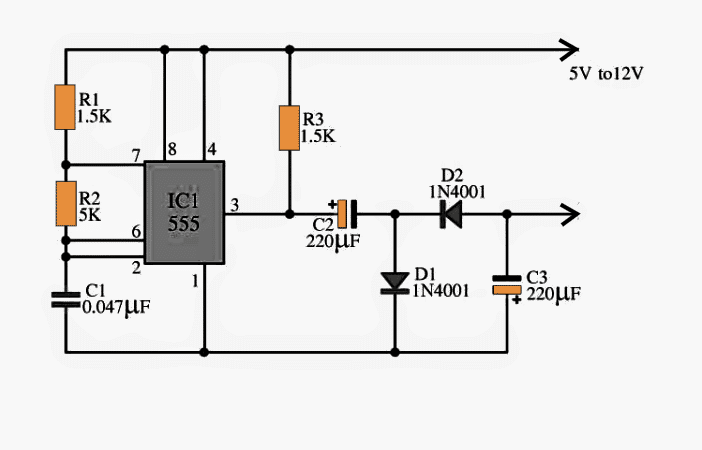
Yksinkertainen RMS-sovitettu PWM-ekvivalentti siniaaltoaaltomuodon generaattori voidaan valmistaa käyttämällä IC 555: ää ja IC 4060: ta, kuten seuraavassa kuvassa on esitetty.
Tätä rakennetta voidaan sitten käyttää antamaan invertterien tuottaa siniaaltoa vastaava aaltomuoto lähdöissään ja yhdistetyn verkkojohdon poikki.
Kukin näistä PWM-prosessoreista vaaditaan erikseen kullekin pinottavalle invertterimoduulille.
PÄIVITTÄÄ: Näyttää siltä, että yhtä PWM-prosessoria voidaan käyttää yhteisesti kaikkien transistorialustojen pilkkomiseen edellyttäen, että kukin MJ3001-tukiasema muodostaa yhteyden tiettyyn BC547-kollektoriin yksittäisen 1N4148-diodin kautta. Tämä yksinkertaistaa suunnittelua suuressa määrin.

Edellä olevan PWM-geneartoripiirin eri vaiheet voidaan ymmärtää seuraavan pisteen avulla:
IC 555: n käyttö PWM-generaattorina
IC 555 on konfiguroitu PWM-generaattorin peruspiiriksi. IC voi vaatia nopeita kolmioaaltoja nastallaan 7 ja referenssipotentiaalia nastallaan 5, joka määrittää PWM-tason lähtötapillaan # 3, jotta voidaan tuottaa säädettävät PWM-ekvivalentit pulssit halutulla RMS: llä.
IC 4060: n käyttö kolmion aaltogeneraattorina
Kolmion aaltojen muodostamiseksi IC 555 vaatii neliöaaltoja nastassaan # 2, joka on hankittu IC 4060 -oskillaattorisirusta.
IC 4060 määrittää PWM-taajuuden tai yksinkertaisesti 'pylväiden' määrän kussakin AC-puolisyklissä.
IC 4060: ta käytetään pääasiassa kertomaan matalataajuisen näytteen invertterilähdöstä suhteellisen suureksi taajuudeksi nastastaan # 7. Näytetaajuus varmistaa periaatteessa, että PWM-pilkkominen on tasainen ja synkronoitu kaikille taajuusmuuttajan moduuleille. Tämä on tärkein syy siihen, miksi IC 4060 on mukana, muuten toinen IC 555 olisi voinut helposti tehdä työn sen sijaan.
IC 555: n tapin nro 5 vertailupotentiaali saadaan piirin vasemmassa reunassa olevasta opamp-jännitteen seuraajasta.
Kuten nimestä voi päätellä, tämä opamp tuottaa täsmälleen saman suuruisen jännitteen sen tapissa # 6, joka näkyy sen tapissa # 3 ... kuitenkin sen tapin # 3 nastan # 6 replikointi on hienosti puskuroitu ja on siksi rikkaampi kuin sen pin3-laatua, ja se on tarkka syy tämän vaiheen sisällyttämiseen suunnitteluun.
Tämän IC: n pin3: een liitettyä 10 k: n esiasetusta käytetään RMS-tason säätämiseen, mikä lopulta hienosäätää IC 555 -ulostulon PWM: t halutulle RMS-tasolle.
Tätä RMS: ää käytetään sitten teholaitteiden perustoihin pakottaakseen heidät toimimaan määritellyillä PWM RMS -tasoilla, mikä puolestaan saa lähdön AC hankkimaan puhtaan siniaallon kaltaisen attribuutin oikean RMS-tason kautta. Tätä voidaan parantaa edelleen käyttämällä LC-suodatinta kaikkien muuntajien ulostulokäämissä.
Tämän 4 kVA: n pinottavan synkronoidun taajuusmuuttajapiirin seuraava ja viimeinen osa tarkentavat automaattista kuormituksen korjaustoimintoa, jonka avulla taajuusmuuttajat voivat toimittaa ja ylläpitää oikean määrän tehoa lähtöjohtolinjassa vaihtelevan kuormanvaihdon mukaisesti.
Olemme toistaiseksi kattaneet ehdotetun synkronoidun 4 kVA: n pinottavan invertteripiirin kaksi päävaatimusta, jotka sisältävät taajuuden, vaiheen ja PWM: n synkronoinnin taajuusmuuttajien yli siten, että minkä tahansa taajuusmuuttajan vikaantumisella ei ollut vaikutusta muuhun yllä olevien parametrien kannalta .
Automaattinen kuormituksen korjausvaihe
Tässä artikkelissa yritämme selvittää automaattisen kuormituksen korjaustoiminnon, joka voi mahdollistaa taajuusmuuttajien kytkemisen päälle tai pois päältä peräkkäin vasteena vaihteleviin kuormitustilanteisiin lähtöjohdossa.
Yksinkertaista LM324 IC: tä käyttävää nelikomparaattoria voidaan käyttää automaattisen peräkkäisen kuormituksen korjauksen toteuttamiseksi seuraavan kaavion mukaisesti:

Yllä olevasta kuvasta voimme nähdä neljä IC LM324: n opampia, jotka on konfiguroitu neljäksi erilliseksi vertailijaksi, joiden ei-käänteiset tulot on kiinnitetty yksittäisiin esiasetuksiin, kun taas heidän käänteisiin tuloihinsa viitataan kiinteällä zener-jännitteellä.
Asiaankuuluvat esiasetukset säädetään yksinkertaisesti siten, että opampit tuottavat korkeita lähtöjä peräkkäin heti, kun verkkojännite ylittää aiotun kynnyksen ... ja päinvastoin.
Kun näin tapahtuu, asiaankuuluvat transistorit kytkeytyvät opamp-aktivoinnin mukaisesti.
Vastaavien BJT: n kerääjät on kytketty PWM-ohjainvaiheessa käytetyn jännitteen seuraajaopampin IC 741 napaan # 3, mikä pakottaa opampin lähdön menemään matalaksi tai nollaksi, mikä puolestaan aiheuttaa nollajännitteen ilmestymisen PWM IC 555: n tapissa # 5 (kuten osassa 2 käsitellään).
Kun IC 555: n nasta # 5 käytetään tällä nollalogiikalla, pakottaa PWM: t kapenemaan tai minimiarvoon, mikä saa kyseisen invertterin lähdön melkein sammumaan.
Edellä mainituilla toimilla yritetään vakauttaa tuotos aikaisempaan normaaliin tilaan, mikä pakottaa PWM: n jälleen laajentumaan, ja tämä köydenveto tai opampien jatkuva vaihtaminen pitävät johdonmukaisesti mahdollisimman vakaana vastauksena kiinnitettyjen kuormien vaihtelut.
Tämän automaattisen kuormituksen korjauksen avulla, joka toteutetaan ehdotetussa 4 kVA: n pinottavassa invertteripiirissä, melkein tehdään suunnittelu täydelliseksi kaikilla ominaisuuksilla, joita käyttäjä on pyytänyt artikkelin osassa 1.
Edellinen: Tee tämä SleepWalk-hälytys - Suojaudu Sleepwalking Dangersilta Seuraava: IC 555 -napit, vakaa, monostabiili, bistabiili piirit tutkituilla kaavoilla