Johdanto
Yksivaiheisia induktiomoottoreita käytetään laajasti laitteissa ja teollisuudessa. Pysyvä jaettu kondensaattori (PSC) yksivaiheinen induktiomoottori on yksinkertaisin ja yleisimmin käytetty tämän tyyppinen moottori.
Suunnittelun mukaan PSC-moottorit ovat yksisuuntaisia, mikä tarkoittaa, että ne on suunniteltu pyörimään yhteen suuntaan. Lisäämällä joko ylimääräisiä käämiä ja ulkoisia releitä ja kytkimiä tai käyttämällä vaihdemekanismeja, pyörimissuuntaa voidaan muuttaa. Tässä ajatuksessa keskustelemme yksityiskohtaisesti siitä, kuinka ohjata PSC-moottorin nopeutta molempiin suuntiin PIC16F72-mikrokontrollerilla ja tehoelektroniikalla.
PIC16F72-mikrokontrolleri valittiin, koska se on yksi yksinkertaisimmista ja edullisimmista yleiskäyttöisistä mikrokontrollereista, joita Microchipillä on salkussa. Vaikka sillä ei ole laitteistossa olevia PWM-moduuleja täydentävien PWM-lähtöjen ajamiseksi, joissa on kuollut kaista, kaikki PWM: t luodaan laiteohjelmistossa ajastimien avulla ja lähdetään yleiskäyttöisiin lähtöliittimiin.
Mikä on taajuusmuuttaja?
Taajuusmuuttaja tai VFD on tapa, jolla voidaan säätää induktiomoottorin nopeutta soveltamalla vaihtovirtajännitteen taajuutta. Ohjaamalla lähtöliitännän vaihtotaajuutta on mahdollista ajaa moottoria eri nopeuksilla vaatimusten mukaisesti. Nämä ovat säädettävissä olevia nopeudensäätölaitteita, joita käytetään suurelta osin teollisissa sovelluksissa, kuten pumpuissa, ilmanvaihtojärjestelmissä, hisseissä, työstökoneiden käyttölaitteissa jne. Siksi ensimmäinen vaatimus on tuottaa siniaalto eri taajuuksilla VFD: lle.
Mikä tekniikka on käytössä VFD: ssä?
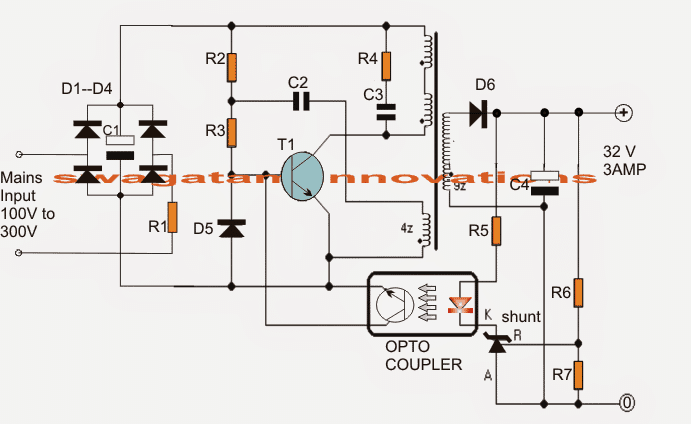
Se on järjestelmä, joka antaa vaihtovirtaisen lähtötehon vaihtelevalla taajuudella moottorin nopeuden säätämiseksi tarpeiden mukaan. Yksivaiheiset muuttuvan taajuusmuuttajat ovat yleisempiä, koska useimmat laitteet työskentelevät yksivaiheisessa vaihtovirtalähteessä. Se koostuu täysiaaltosillan tasasuuntaajasta, jolla 230/110 voltin vaihtovirta muunnetaan noin 300/150 voltin tasavirraksi. Sillan tasasuuntaajan lähtö DC tasoitetaan arvokkaalla tasoituskondensaattorilla vaihtovirran aaltoilun poistamiseksi. Tämä kiinteä jännite DC syötetään sitten taajuuden muodostavaan piiriin, joka on muodostettu MOSFET (metallioksidikenttitransistori) / IGBT (eristetty portti bipolaaritransistori) -transistoreista. Tämä MOSFET / IGBT-piiri vastaanottaa DC: n ja muuntaa sen vaihtovirta-vaihtovirraksi laitteen nopeuden ohjaamiseksi.
Taajuuden muutos voidaan saavuttaa käyttämällä elektronisia piirejä tai mikro-ohjainta. Tämä piiri muuttaa MOSFET / IGBT-piirin hila-asemaan käytetyn jännitteen taajuutta (PWM). Tällöin vaihtelevan taajuuden vaihtojännite ilmestyy lähtöön. Mikrokontrolleri voidaan ohjelmoida muuttamaan lähdön taajuutta tarpeen mukaan.
VFD-järjestelmä:
Taajuuslaitteessa on kolme osaa, kuten vaihtovirtamoottori, ohjain ja käyttöliittymä.
VFD: ssä käytetty vaihtovirtamoottori on yleensä kolmivaiheinen induktiomoottori, vaikka yksivaiheinen moottori käytetään joissakin järjestelmissä. Kiinteänopeuksiseen käyttöön tarkoitettuja moottoreita käytetään yleensä, mutta jotkut moottorimallit tarjoavat paremman suorituskyvyn VFD: ssä kuin vakiomalli.
Ohjainosa on kiinteä elektroninen tehomuuntajapiiri, joka muuntaa vaihtovirran tasavirraksi ja sitten lähes siniaaltovirraksi. Ensimmäinen osa on vaihtovirta-tasavirta-muunninosa, jossa on täysi-aaltosuuntaajasilta, yleensä kolmivaiheinen / yksivaiheinen aaltosilta. Tämä DC-välituote muunnetaan sitten lähes siniaalto AC: ksi vaihtosuuntaajan kytkentäpiirin avulla. Tässä MOSFET / IGBT-transistoreita käytetään vaihtamaan tasavirta vaihtovirtaan.
Taajuusmuuttajaosa muuntaa DC: n kolmeksi AC-kanavaksi kolmivaiheisen moottorin käyttämiseksi. Ohjain-osa voidaan myös suunnitella antamaan parempi tehokerroin, vähemmän harmonisia vääristymiä ja matala herkkyys vaihtovirran tuloille.
Volttia / Hz: n säätö:
Ohjainpiiri säätelee syötetyn vaihtovirran taajuutta moottorille volttia per hertsi -menetelmällä. Vaihtovirtamoottori vaatii vaihtelevaa käyttöjännitettä, kun taajuus muuttuu antamaan määritetty vääntömomentti. Esimerkiksi, jos moottori on suunniteltu toimimaan 440 voltissa 50 Hz: n taajuudella, moottoriin syötetty vaihtovirta on vähennettävä puoleen (220 volttia), kun taajuus muuttuu puoliksi (25 Hz). Tämä säätö perustuu voltteihin / Hz. Edellä mainitussa tapauksessa suhde on 440/50 = 8,8 V / Hz.
 Muut jännitteen säätötavat:
Muut jännitteen säätötavat:
 Muut jännitteen säätötavat:
Muut jännitteen säätötavat:Voltti / Hz-ohjauksen lisäksi edistyneemmät menetelmät, kuten suora momenttisäätö tai DTC, Avaruusvektorin pulssinleveyden modulointi (SVPWM) , jne. käytetään myös moottorin nopeuden säätämiseen. Ohjaamalla moottorin jännitettä magneettivuotoa ja momenttia voidaan hallita tarkasti. PWM-menetelmässä invertterikytkimet tuottavat melkein siniaallon sarjan kapeiden pulssien läpi Pseudo-sinimuotoisella vaihtelevalla pulssin kestolla.
Käyttöliittymä:
Tämän osan avulla käyttäjä voi käynnistää / pysäyttää moottorin ja säätää nopeutta. Muita palveluja ovat moottorin peruutus, vaihtaminen manuaalisen ja automaattisen nopeuden ohjauksen välillä jne. Käyttöliittymä koostuu paneelista, jossa on näyttö tai ilmaisimet ja mittarit moottorin nopeuden, käytetyn jännitteen jne. Osoittamiseksi. Yleensä toimitetaan joukko näppäinkytkimiä. järjestelmän ohjaamiseen.
Sisäänrakennettu - Soft Start:
Tavallisessa induktiomoottorissa, joka on kytketty päälle vaihtokytkimellä, käytetty virta on paljon suurempi kuin nimellisarvo ja se voi kasvaa kuormituksen kiihtyvyyden kasvaessa moottorin täyden nopeuden saavuttamiseksi.
Toisaalta VFD-ohjatussa moottorissa käytetään alun perin matalaa taajuutta. Tämä taajuus ja jännite kasvavat hallitulla nopeudella kuormituksen nopeuttamiseksi. Tämä kehittää melkein enemmän vääntöä kuin moottorin nimellisarvo.
VFD-moottorin kommutaatio :
Taajuus ja käytetty jännite alennetaan ensin hallitulle tasolle ja pidetään sitten laskemassa, kunnes se muuttuu nollaksi ja moottori sammuu.
Sovelluspiiri yksivaiheisen induktiomoottorin nopeuden säätämiseksi
Lähestyminen on suhteellisen helppoa virtapiirin ja ohjauspiirin osalta. Tulopuolella käytetään jännitteen kaksinkertaistimia ja lähtöpuolella H-siltaa tai 2-vaiheista taajuusmuuttajaa, kuten kuvassa 2 on esitetty. Pää- ja käynnistyskäämien toinen pää on kytketty kuhunkin puolisillaan ja muut päät on kytketty vaihtovirtalähteen neutraaliin pisteeseen.
Ohjauspiiri vaatii neljä PWM: ää, joissa on kaksi komplementaarista paria ja riittävä kuollut kaista komplementaaristen lähtöjen välillä. PWM: n kuolleet kaistat ovat PWM0-PWM1 ja PWM2-PWM3. PIC16F72: ssä ei ole laitteistoon suunniteltuja PWM-moduuleja tuottamaan tarvitsemamme tapa. VF: n osalta DC-väylä syntetisoidaan vaihtelemalla taajuutta ja amplitudia. Tämä antaa kaksi sinijännitettä vaiheen ulkopuolella.
Jos pääkäämitykseen käytetty jännite viivästyttää käynnistyskäämitystä 90 astetta, moottori käy yhteen (ts. Eteenpäin) suuntaan. Jos haluamme muuttaa pyörimissuuntaa, pääkäämiin kohdistuva jännite on käynnistyskäämityksen suorittaminen.
Toivon, että sinulla on käsitys induktiomoottorin taajuusmuuttajasta yllä olevasta artikkelista. joten jos sinulla on kysyttävää tästä konseptista tai sähkö- ja sähköinen projekti jätä alla oleva kommenttiosio.