Nykymaailmassa robotilla on tärkeä rooli . Robotin päätarkoitus on vähentää ihmisen voimaa. Robotteja käytetään elektroniikassa monissa sovelluksissa. Tässä artikkelissa olemme keskustelleet robotin rakentamisesta Arduino-moduulilla ja 8051-mikrokontrollerilla. Arduino-robotin rakentamiseksi selitämme arduino-robotista esteiden välttämisellä. Tarvittavat komponentit sisältävät robotin rungon, tasavirtamoottorin, ultraäänianturin, Arduino-moduulin, moottoriohjaimen IC: n ja Arduino-moduulin
Kuinka rakentaa robotti?
tarvittavat komponentit robotin rakentamiseen sisältyy seuraava
Robotin runko
Robotin perusrunko esteen välttämisen robotti näkyy seuraavassa kuvassa. Robottirunko on muovinen runko ja siinä on pyörät molemmin puolin. Robottirungon eteen on järjestetty ultraäänianturi. Este tunnistaa ultraäänianturin avulla. Kun ultraäänianturi havaitsee esteen robotin liikkuessa, robotti liikkuu sivuun ja jatkaa liikkumistaan.

Robotin runko
DC-moottori
DC-moottori on sähkömoottori ja se toimii tasasähköllä. Minkä tahansa sähkömoottorin toiminta perustuu sähkömagneettisuuteen. Magneettikenttä syntyy virtaa johtavalla johtimella, kun se sijoitetaan ulkoiseen magneettikenttään, se kokee voiman, joka on verrannollinen johtimen virtaan.Yleensä tiedämme, että magneetit ovat päinvastaisessa vetovoimassa pohjoisesta etelään ja jos napaisuudet ovat samat kuin pohjoisesta pohjoiseen ja etelästä etelään, magneetit hylkäävät.

DC-moottori
DC-moottorin sisäinen kokoonpano on suunniteltu kiinnittämään magneettinen vuorovaikutus virtaa johtavan johdon ja ulkoisen magneettikentän välillä liikkeen tuottamiseksi. Tässä käytämme kahta tasavirtamoottoria, kukin moottori sisältää 6v ja kaksi DC-moottoria yhteensä 12v. Kaksi tasavirtamoottoria sijoitetaan robotin runkoon, jonka voimme havaita seuraavassa kuvassa. Robotin runkoa liikutetaan tasavirtamoottoreiden avulla

Robottirunko DC-moottorilla
Arduino-moduuli
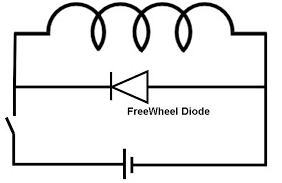
Seuraava kuva näyttää arduino-moduulin kuvan. arduino-moduuli on tärkeä rooli arduino-pakettia käyttävän estorobotin suunnittelussa. Arduinon vastaanottotappi on kytketty ultraäänianturin toiseen tapiin ja arduino-moduulin 1., 2. ja 3. nasta on kytketty tasavirtamoottoriohjaimeen. Yhteiset komponenttikondensaattori ja diodi liitetään myös arduino-moduuliin akkuvirran avulla.

Arduino-moduuli
Moottorin kuljettajan IC
DC-moottorin käyttäminen moottorin kuljettajan IC käytetty. Moottorin ohjaimen tapit 3,6 & 11, 14 on kytketty tasavirtamoottoriin. Tulotapit 1 ja 2 on kytketty arduino-moduuliin ja aktivointitappi on kytketty arduinon lähetintappiin. Moottorinohjaimen tapit 4, 5, 12, 13 on kytketty maahan.

Moottorin kuljettajan IC
Ultraäänianturi
Tässä käsitteessä ultraäänianturi käytetään havaitsemaan edessä oleva este ja se lähettää komennon arduino-levylle. Tulosignaalista riippuen mikro-ohjain ohjaa robotin liikkumaan vaihtoehtoisiin suuntiin.

Ultraäänianturi
Arduino-robotin esteiden välttämisen sovellukset
- Arduino-robotti voi liikkua millä tahansa pinnalla
- Se voi liikkua metallipinnalla kuten jääkaapin runko.
Alla olevassa kuvassa on arduino-robotti esteiden välttämiseksi

Arduino-robotti esteiden välttämiseen
Rakentaa robotti 8051-mikrokontrolleri selitämme metallinilmaisimen robotti-ajoneuvosta. Robotin rakentamiseen 8051-mikrokontrollerilla tarvittavat komponentit ovat
- 8051-mikrokontrolleri
- DC-moottorit
- Moottorin kuljettajat
- Metallinilmaisin
- Dekooderi
- Kooderi
- Painikkeet
- Kristalli
- RF-lähetin ja vastaanotin
Metallinilmaisin
metallinilmaisin on kela, jossa on yksi tai useampi metallikäämi, joita käytetään metallien havaitsemiseen maassa. Metallinilmaisin toimii sähkömagneettisen induktion periaatteella. Metallinilmaisin on kytketty robotin runkoon piirilevyn kautta, jonka voimme havaita viimeisessä kuvassa. Seuraava kuva näyttää yleisen metallinilmaisimen, jota käytetään elektronisissa projekteissa.

Metallinilmaisin
Painikkeet
Painikkeet ovat painikkeita, jotka koostuvat kovametalleista, kuten muovista ja metallista. Yleensä painikkeita käytetään ohjelman nollaamiseen mikro-ohjaimessa. Seuraava kuva näyttää painikkeen kuvan.

Paina nappia
8051-mikrokontrolleri
8051-mikrokontrolleri koostuu 40 nastasta . Mikrokontrollerin 4. ja 5. nasta on kytketty kideoskillaattoriin. Vcc-nasta annetaan 5 V: n virtalähteeseen ja maadoitettu tappi on kytketty maahan. Mikrokontrollerin tapit 15, 16, 18, 19 on kytketty HT12E: n kooderi-IC: hen. Mikrokontrollerin tapit 2, 7, 8, 9 on kytketty painikkeisiin.
Seuraava kuva, kun kaikki komponentit, kuten vastus, kondensaattori, kideoskillaattori, 8051-sarjan mikrokontrolleri, kooderit ja niin edelleen, on kytketty piirilevy .

Piirilevyliitännät
Alla olevassa kuvassa on metallinilmaisurobotti 8051-sarjan mikrokontrollerilla.

Metallinilmaisurobotti 8051-sarjan mikrokontrollerilla
Tässä artikkelissa olemme keskustelleet Kuinka rakentaa robotti arduino- ja 8051-mikrokontrollerilla . Toivon, että lukemalla tämän artikkelin olet saanut perustiedot robotin rakentamiseksi. Jos sinulla on kysyttävää tästä artikkelista tai elektroniikasta ja viestintäprojektit kommentoi alla olevaan osioon. Tässä on kysymys sinulle, Mikä on 8051-sarjan mikrokontrolleri?
.