
Kuten nimestä voi päätellä, tässä artikkelissa annetaan tarkka käsitys PID-säätimen rakenteesta ja toiminnasta. Kuitenkin menemme yksityiskohtiin, saakaamme johdanto PID-ohjaimista. PID-säätimiä löytyy monenlaisista sovelluksista teollisen prosessin ohjaukseen. Noin 95% suljetun piirin toiminnoista teollisuuden automaatio käyttää PID-ohjaimia. PID tarkoittaa suhteellista-integraalista johdannaista. Nämä kolme ohjainta on yhdistetty siten, että se tuottaa ohjaussignaalin. Palauteohjaimena se toimittaa ohjauslähdön haluttuihin tasoihin. Ennen mikroprosessoreiden keksimistä analogiset elektroniset komponentit toteuttivat PID-ohjauksen. Mutta tänään mikroprosessorit käsittelevät kaikki PID-säätimet. Ohjelmoitavat logiikkaohjaimet sinulla on myös sisäänrakennettu PID-ohjaimen ohje. PID-säätimien joustavuuden ja luotettavuuden vuoksi niitä käytetään perinteisesti prosessinohjaussovelluksissa.
Mikä on PID-ohjain?
Termi PID tarkoittaa suhteellista integraalijohdannaista ja se on eräänlainen laite, jota käytetään erilaisten prosessimuuttujien, kuten paineen, virtauksen, lämpötilan ja nopeuden, säätämiseen teollisissa sovelluksissa. Tässä ohjaimessa ohjaussilmukan takaisinkytkentälaitetta käytetään kaikkien prosessimuuttujien säätämiseen.
Tämän tyyppistä ohjausta käytetään järjestelmän ohjaamiseen objektiivisen sijainnin suuntaan muuten tasolle. Se on melkein kaikkialla lämpötilan säätöön ja sitä käytetään tieteellisissä prosesseissa, automaatiossa ja lukemattomissa kemikaaleissa. Tässä ohjaimessa suljetun piirin takaisinkytkentää käytetään ylläpitämään menetelmän todellinen ulostulo, kuten lähellä tavoitetta, muuten lähtö kiinteässä kohdassa, jos mahdollista. Tässä artikkelissa käsitellään PID-ohjaimen suunnittelua ja niissä käytettyjä ohjaustiloja, kuten P, I ja D.
Historia
PID-ohjaimen historia on, Vuonna 1911 Elmer Sperry kehitti ensimmäisen PID-ohjaimen. Sen jälkeen TIC (Taylor Instrumental Company) otti käyttöön entisen pneumaattisen ohjaimen, joka oli täysin viritettävissä vuonna 1933. Muutaman vuoden kuluttua ohjausinsinöörit poistivat vakaassa tilassa olevan virheen, joka löytyy verrannollisista säätimistä, virittämällä loppu väärään arvoon, kunnes virhe ei ollut nolla.
Tämä uudelleensäätö sisälsi virheen, joka tunnetaan nimellä proportional-Integral controller. Sen jälkeen, vuonna 1940, ensimmäinen pneumaattinen PID-ohjain kehitettiin johdannaistoimenpiteellä ylitysongelmien vähentämiseksi.
Vuonna 1942 Ziegler & Nichols otti käyttöön virityssäännöt, jotta insinöörit löysivät ja asettaisivat PID-säätimien sopivat parametrit. Viimeinkin automaattisia PID-säätimiä käytettiin laajasti teollisuudessa vuoden 1950 puolivälissä.
PID-ohjaimen lohkokaavio
Suljetun piirin järjestelmä, kuten PID-ohjain, sisältää takaisinkytkentäjärjestelmän. Tämä järjestelmä arvioi palautemuuttujan kiinteän pisteen avulla virhesignaalin luomiseksi. Tämän perusteella se muuttaa järjestelmän ulostuloa. Tämä toimenpide jatkuu, kunnes virhe saavuttaa nollan, muuten palautemuuttujan arvosta tulee kiinteä piste.
Tämä ohjain tarjoaa hyviä tuloksia verrattuna ON / OFF-tyyppiseen ohjaimeen. ON / OFF-tyyppisessä ohjaimessa on yksinkertaisesti kaksi ehtoa järjestelmän hallitsemiseksi. Kun prosessin arvo on pienempi kuin kiinteä piste, se kytkeytyy päälle. Vastaavasti se sammuu, kun arvo on korkeampi kuin kiinteä arvo. Lähtö ei ole vakaa tällaisessa ohjaimessa ja se heilahtaa usein kiinteän pisteen alueella. Tämä ohjain on kuitenkin vakaampi ja tarkempi kuin ON / OFF-tyyppinen ohjain.

PID-ohjaimen toiminta
PID-ohjaimen toiminta
Kun käytetään edullista yksinkertaista ON-OFF-ohjainta, vain kaksi ohjaustilaa ovat mahdollisia, kuten täysin ON tai OFF. Sitä käytetään rajoitetussa ohjaussovelluksessa, jossa nämä kaksi ohjaustilaa ovat riittäviä ohjaustavoitteelle. Tämän ohjauksen värähtelevä luonne kuitenkin rajoittaa sen käyttöä, ja siksi se korvataan PID-ohjaimilla.
PID-ohjain ylläpitää lähtöä siten, että prosessimuuttujan ja ohjearvon / halutun lähdön välillä ei ole nollavirhettä suljetun silmukan operaatioilla. PID käyttää kolmea ohjauskäyttäytymistä, jotka selitetään alla.
P- ohjain
Suhteellinen tai P-ohjain antaa lähdön, joka on verrannollinen virhevirtaan e (t). Se vertaa haluttua tai asetettua pistettä todelliseen arvoon tai palauteprosessin arvoon. Tuloksena oleva virhe kerrotaan suhteellisella vakiolla tuotoksen saamiseksi. Jos virhearvo on nolla, tämä ohjaimen lähtö on nolla.

P-ohjain
Tämä ohjain vaatii esijännityksen tai manuaalisen nollauksen, kun sitä käytetään yksin. Tämä johtuu siitä, että se ei koskaan saavuta vakaan tilan tilaa. Se tarjoaa vakaan toiminnan, mutta ylläpitää aina vakaan tilavirheen. Vasteen nopeutta lisätään, kun suhteellinen vakio Kc kasvaa.

P-ohjaimen vastaus
I-ohjain
Koska p-ohjain on rajoitettu, jos prosessimuuttujan ja asetuspisteen välillä on aina siirtymä, tarvitaan I-ohjainta, joka tarjoaa tarvittavat toimet vakaan tilavirheen eliminoimiseksi. Se integroi virheen ajanjaksolle, kunnes virhearvo saavuttaa nollan. Se pitää arvon lopullisessa ohjauslaitteessa, jossa virheestä tulee nolla.

PI-ohjain
Integraali ohjaus vähentää lähtöään, kun tapahtuu negatiivinen virhe. Se rajoittaa vasteen nopeutta ja vaikuttaa järjestelmän vakauteen. Vasteen nopeutta lisätään vähentämällä integraalivahvistusta Ki.

PI-ohjaimen vastaus
Yllä olevassa kuvassa, kun I-ohjaimen vahvistus pienenee, myös vakaan tilan virhe vähenee. Useimmissa tapauksissa PI-ohjainta käytetään erityisesti silloin, kun suurnopeusvastetta ei vaadita.
PI-ohjainta käytettäessä I-ohjaimen lähtö on rajoitettu jonkin verran alueeseen voittaakseen kiinteä purkaminen olosuhteissa, joissa integraaliteho kasvaa jopa nollavirhetilassa laitoksen epälineaarisuuksien vuoksi.
D-ohjain
I-ohjaimella ei ole kykyä ennustaa virheiden tulevaa käyttäytymistä. Joten se reagoi normaalisti, kun ohjearvoa muutetaan. D-ohjain voittaa tämän ongelman ennakoimalla virheen tulevan käyttäytymisen. Sen tuotos riippuu virheen muutosnopeudesta ajan suhteen kerrottuna johdannaisvakavalla. Se antaa lähdölle potkun aloituksen, mikä lisää järjestelmän vastetta.

PID-ohjain
D: n yllä olevassa kuvavasteessa ohjainta on enemmän verrattuna PI-ohjaimeen, ja myös lähdön asettumisaika pienenee. Se parantaa järjestelmän vakautta kompensoimalla I-ohjaimen aiheuttaman vaiheviiveen. Johdannaisvahvistuksen lisääminen lisää vastauksen nopeutta.

PID-ohjaimen vastaus
Lopuksi havaitsimme, että yhdistämällä nämä kolme ohjainta voimme saada halutun vastauksen järjestelmälle. Eri valmistajat suunnittelevat erilaisia PID-algoritmeja.
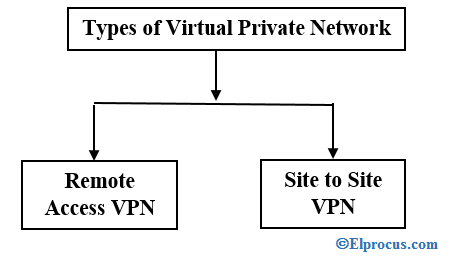
PID-ohjaimen tyypit
PID-säätimet on luokiteltu kolmeen tyyppiin, kuten PÄÄLLE / POIS, suhteellinen ja vakiotyyppinen ohjain. Näitä ohjaimia käytetään ohjausjärjestelmän perusteella, käyttäjää voidaan käyttää ohjaimella menetelmän säätämiseen.
PÄÄLLE / POIS-ohjaus
On-off-ohjausmenetelmä on yksinkertaisin lämpötilan säätämiseen käytetty laite. Laitteen ulostulo voi olla PÄÄLLE / POIS ilman keskitilaa. Tämä ohjain kytkee lähdön päälle vain, kun lämpötila ylittää kiinteän pisteen. Rajaohjain on tietyntyyppinen ON / OFF-ohjain, joka käyttää lukitusreleä. Tämä rele nollataan manuaalisesti ja sitä käytetään menetelmän sammuttamiseen, kun tietty lämpötila on saavutettu.
Suhteellinen hallinta
Tällainen ohjain on suunniteltu poistamaan pyöräily, joka on kytketty ON / OFF-ohjauksella. Tämä PID-säädin vähentää normaalia tehoa, joka syötetään lämmitintä kohti, kun lämpötila saavuttaa kiinteän pisteen.
Tällä säätimellä on yksi ominaisuus lämmittimen ohjaamiseksi siten, että se ei ylitä kiinteää pistettä, mutta se saavuttaa kiinteän lämpötilan ylläpitämiseksi kiinteän pisteen.
Tämä mittasuhde voidaan saavuttaa kytkemällä lähtö päälle ja pois päältä pieniksi ajanjaksoiksi. Tämä ajanmittaus muuttaa suhdetta ON-ajasta OFF-aikaan lämpötilan säätämiseksi.
Vakiotyyppinen PID-ohjain
Tällainen PID-säädin yhdistää suhteellisen ohjauksen integraalin ja johdannaisen ohjauksen avulla auttaakseen yksikköä automaattisesti kompensoimaan järjestelmän muutoksia. Nämä muutokset, integraali ja johdannainen ilmaistaan aikaperusteisina yksikköinä.
Näihin ohjaimiin viitataan myös vastavuoroisesti, RATE & RESET vastaavasti. PID: n ehdot on mukautettava erikseen muuten viritettynä tiettyyn järjestelmään kokeilun lisäksi virheiden kanssa. Nämä ohjaimet tarjoavat tarkimman ja vakaimman ohjauksen 3 tyyppisestä ohjaimesta.
Reaaliaikaiset PID-ohjaimet
Tällä hetkellä markkinoilla on erilaisia PID-säätimiä. Näitä säätimiä käytetään teollisuuden säätövaatimuksiin, kuten paine, lämpötila, taso ja virtaus. Kun näitä parametreja ohjataan PID: n kautta, valinnoissa käytetään erillistä PID-ohjainta tai joko PLC: tä.
Näitä erillisiä säätimiä käytetään aina, kun yksi muuten vaaditaan kahden silmukan tarkastamista ja ohjaamista muuten olosuhteissa, missä on monimutkainen pääsyoikeus suurempien järjestelmien kautta.
Nämä ohjauslaitteet tarjoavat erilaisia vaihtoehtoja yksin- ja kaksoissilmukkaohjauksille. Erilliset PID-ohjaimet tarjoavat useita kiinteän pisteen kokoonpanoja autonomisten useiden hälytysten tuottamiseksi.
Nämä itsenäiset ohjaimet käsittävät pääasiassa Honeywellin PID-säätimet, Yokogawan lämpötilasäätimet, OMEGA: n, Siemensin ja ABB: n säätimet.
PLC: itä käytetään kuten PID-säätimiä useimmissa teollisissa ohjaussovelluksissa. PID-lohkojen järjestäminen voidaan tehdä PAC: iden tai PLC: iden sisällä, jotta saadaan parempia valintoja tarkalle PLC-ohjaukselle. Nämä ohjaimet ovat älykkäämpiä ja tehokkaampia verrattuna erillisiin ohjaimiin. Jokainen PLC sisältää PID-lohkon ohjelmointiohjelmistossa.
Viritysmenetelmät
Ennen kuin PID-säädin toimii, se on viritettävä vastaamaan ohjattavan prosessin dynamiikkaa. Suunnittelijat antavat oletusarvot P-, I- ja D-termeille, eivätkä nämä arvot voineet antaa toivottua suorituskykyä ja johtavat joskus epävakauteen ja hitaaseen ohjaustehoon. PID-säätimien virittämiseksi on kehitetty erityyppisiä viritysmenetelmiä, jotka vaativat käyttäjän paljon huomiota suhteellisten, integraalisten ja johdannaisten vahvistusten parhaiden arvojen valitsemiseen. Jotkut näistä on esitetty alla.
PID-säätimiä käytetään useimmissa teollisissa sovelluksissa, mutta tämän säätimen asetukset tulisi tietää säätääkseen sitä oikein ensisijaisen lähdön tuottamiseksi. Tässä viritys ei ole muuta kuin menettely, jolla vastaanotetaan ihanteellinen vastaus ohjaimelta asettamalla parhaat suhteelliset voitot, integraaliset ja johdannaiskertoimet.
Haluttu PID-säätimen lähtö voidaan saada säätimellä. Tarvittavan ulostulon saamiseksi ohjaimelta on erilaisia tekniikoita, kuten kokeilu ja virhe, Zeigler-Nichols ja prosessireaktiokäyrä. Yleisimmin käytetyt menetelmät ovat kokeilu ja virhe, Zeigler-Nichols jne.
Koe- ja virhetapa: Se on yksinkertainen menetelmä PID-säätimen virittämiseen. Kun järjestelmä tai ohjain toimii, voimme virittää ohjaimen. Tässä menetelmässä meidän on ensin asetettava Ki- ja Kd-arvot nollaksi ja kasvatettava suhteellista termiä (Kp), kunnes järjestelmä saavuttaa värähtelykäyttäytymisen. Kun se on värähtelevä, säädä Ki (Integral-termi) siten, että värähtelyt pysähtyvät ja säätävät lopuksi D: tä saadakseen nopean vastauksen.
Prosessireaktiokäyrän tekniikka: Se on avoimen silmukan viritystekniikka. Se tuottaa vastauksen, kun järjestelmään syötetään porrastulo. Aluksi meidän on sovellettava jonkin verran ohjauslähtöä järjestelmään manuaalisesti ja tallennettava vastekäyrä.
Sen jälkeen meidän on laskettava kaltevuus, kuollut aika, käyrän nousuaika ja lopuksi korvattava nämä arvot P-, I- ja D-yhtälöissä saadaksesi PID-termien vahvistusarvot.

Prosessin reaktiokäyrä
Zeigler-Nichols-menetelmä: Zeigler-Nichols ehdotti suljetun silmukan menetelmiä PID-ohjaimen virittämiseksi. Nämä ovat jatkuvan syklin menetelmä ja vaimennettu värähtelymenetelmä. Molempien menetelmien menettelyt ovat samat, mutta värähtelykäyttäytyminen on erilainen. Tässä on ensin asetettava p-ohjaimen vakio, Kp tiettyyn arvoon, kun Ki- ja Kd-arvot ovat nollia. Suhteellista vahvistusta lisätään, kunnes järjestelmä värähtelee vakiona.
Vahvistusta, jolla järjestelmä tuottaa jatkuvasti värähtelyjä, kutsutaan lopulliseksi vahvistukseksi (Ku) ja värähtelyjaksoa lopulliseksi jaksoksi (Pc). Kun se on saavutettu, voimme syöttää P: n, I: n ja D: n arvot PID-ohjaimeen Zeigler-Nichols-taulukossa riippuen käytetystä ohjaimesta, kuten P, PI tai PID, kuten alla on esitetty.

Zeigler-Nichols-taulukko
PID-ohjaimen rakenne
PID-ohjain koostuu kolmesta termistä, nimittäin suhteellisesta, integraalisesta ja johdannaisohjauksesta. Näiden kolmen ohjaimen yhdistetty käyttö antaa ohjausstrategian prosessin ohjaukselle. PID-ohjain manipuloi prosessimuuttujia, kuten paine, nopeus, lämpötila, virtaus jne. Jotkut sovellukset käyttävät PID-säätimiä kaskadiverkkoissa, joissa ohjauksen aikaansaamiseksi käytetään kahta tai useampaa PID: tä.

PID-ohjaimen rakenne
Yllä oleva kuva esittää PID-säätimen rakenteen. Se koostuu PID-lohkosta, joka antaa lähdön prosessilohkolle. Prosessi / laitos koostuu lopullisista ohjauslaitteista, kuten toimilaitteista, säätöventtiileistä ja muista ohjauslaitteista teollisuuden / laitoksen eri prosessien ohjaamiseksi.
Prosessilaitoksen palautesignaalia verrataan asetuspisteeseen tai vertailusignaaliin u (t) ja vastaava virhesignaali e (t) syötetään PID-algoritmiin. Algoritmin suhteellisten, integraalisten ja johdannaisten ohjauslaskelmien mukaan ohjain tuottaa yhdistetyn vasteen tai ohjatun lähdön, jota käytetään laitoksen ohjauslaitteisiin.
Kaikki ohjaussovellukset eivät tarvitse kaikkia kolmea ohjauselementtiä. Yhdistelmiä, kuten PI- ja PD-kontrolleja, käytetään hyvin usein käytännön sovelluksissa.
Sovellukset
PID-ohjainsovellukset sisältävät seuraavat.
Paras PID-säätösovellus on lämpötilan säätö, jossa säädin käyttää lämpötila-anturin tuloa ja sen ulostulo voidaan liittää ohjauselementtiin, kuten puhallin tai lämmitin. Yleensä tämä säädin on yksinkertaisesti yksi elementti lämpötilan säätöjärjestelmässä. Koko järjestelmää on tarkasteltava ja otettava huomioon oikeaa ohjainta valittaessa.
Uunin lämpötilan säätö
Yleensä uuneissa käytetään lämmitystä, ja niissä on valtava määrä raaka-ainetta korkeissa lämpötiloissa. On tavallista, että varattu materiaali sisältää valtavan massan. Tästä johtuen se vie suuren määrän inertiaa eikä materiaalin lämpötila muutu nopeasti edes valtavan lämmön vaikutuksesta. Tämä ominaisuus tuottaa kohtalaisen vakaan PV-signaalin ja sallii johdannaisjakson korjata viat tehokkaasti ilman äärimmäisiä muutoksia joko FCE: ään tai CO: een.
MPPT-latausohjain
Aurinkokennon V-I-ominaisuus riippuu pääasiassa lämpötila-alueesta ja säteilystä. Sääolosuhteiden perusteella virta ja käyttöjännite muuttuvat jatkuvasti. Joten on erittäin merkittävää seurata tehokkaan aurinkosähköjärjestelmän korkeinta PowerPointia. PID-säädin on tottunut löytämään MPPT antamalla kiinteät jännite- ja virtapisteet PID-säätimelle. Kun sääolosuhteita on muutettu, seuranta pitää virran ja jännitteen vakaana.
Tehoelektroniikan muunnin
Tiedämme, että muunnin on tehoelektroniikan sovellus, joten muuntimissa käytetään enimmäkseen PID-ohjainta. Aina kun muunnin liitetään järjestelmään kuormituksen muutoksen perusteella, muuntimen lähtö muuttuu. Esimerkiksi taajuusmuuttajaan liittyy kuormitus, valtava virta syötetään, kun kuormia lisätään. Siten jännitteen ja virran parametri ei ole vakaa, mutta se muuttuu vaatimuksen perusteella.
Tässä tilassa tämä ohjain tuottaa PWM-signaaleja invertterin IGBT: n aktivoimiseksi. Kuormituksen sisäisen muutoksen perusteella vastesignaali syötetään PID-säätimeen niin, että se tuottaa n virheen. Nämä signaalit generoidaan vikasignaalin perusteella. Tässä tilassa voimme saada vaihdettavan tulon ja lähdön samanlaisen taajuusmuuttajan kautta.
PID-ohjaimen käyttö: Suljettu silmukkaohjaus harjattomalle tasavirtamoottorille
PID-ohjaimen liitäntä
PID-ohjaimen suunnittelu ja käyttöliittymät voidaan tehdä Arduino-mikrokontrollerilla. Laboratoriossa Arduino-pohjainen PID-ohjain on suunniteltu käyttämällä Arduino UNO -levyä, elektronisia komponentteja, lämpösähköjäähdytintä, kun taas tässä järjestelmässä käytetyt ohjelmointikielet ovat C tai C ++. Tätä järjestelmää käytetään lämpötilan säätämiseen laboratoriossa.
Tietyn ohjaimen PID-parametrit löytyvät fyysisesti. Eri PID-parametrien toiminta voidaan toteuttaa säätimien erilaisten muotojen välisen kontrastin avulla.
Tämä rajapintajärjestelmä voi laskea lämpötilan tehokkaasti ± 0,6 ℃ virheen avulla, kun taas vakiolämpötila säätyy yksinkertaisesti pienen eron avulla saavutetusta edullisesta arvosta. Tässä järjestelmässä käytetyt käsitteet tarjoavat edullisia ja tarkkoja tekniikoita fysikaalisten parametrien hallitsemiseksi suositellulla alueella laboratoriossa.
Siten tässä artikkelissa käsitellään PID-ohjaimen yleiskatsausta, joka sisältää historian, lohkokaavion, rakenteen, tyypit, työskentelyn, viritystavat, rajapinnat, edut ja sovellukset. Toivomme, että olemme pystyneet tarjoamaan perustiedot mutta tarkat tiedot PID-ohjaimista. Tässä on yksinkertainen kysymys kaikille. Mitä menetelmää parhaiten käytetään PID-ohjaimen optimaalisen toiminnan saavuttamiseksi eri viritysmenetelmien joukossa ja miksi?
Sinua pyydetään antamaan vastauksesi alla olevaan kommenttiosioon.
Valokuvahyvitykset
PID-säätimen lohkokaavio wikimedia
PID-säätimen rakenne, P-ohjain, P - ohjaimen vastaus ja PID-säädin blog.opticontrols
P - ohjaimen vastaus controls.engin.umich
PI- ohjaimen vastaus liha
PID-ohjaimen vastaus wikimedia
Zeigler-Nichols taulukko ohjaimet. moottori






{kind=link}
{kind=link}
{kind=link}
{kind=link}